Лекция 4 Линейное отображение. Линейный Оператор. Матрица линейного оператора.#
Линейным отображением линейного векторного пространства V с операцией сложения векторов, обозначаемой + , в линейное векторное пространство W с операцией сложения векторов, обозначаемой \oplus , называется функция (соответствие) A: V \longrightarrow W (т.е. определенная на V , имеющая значения в W ), обладающая свойством линейности, которое описывается одним из двух эквивалентных представлений:
- A(X_1 + X_2) = A(X_1) \oplus A(X_2) ,
- A(\alpha_1 X_1) = \alpha_1 A(X_1) ,
или - A(\alpha_1 X_1 + \alpha_2 X_2) = \alpha_1 A(X_1) \oplus \alpha_2 A(X_2) .
Указанные свойства должны быть выполнены для любых векторов X_1, X_2 пространства V и любых скаляров \alpha_1, \alpha_2 (вещественных, если оба пространства вещественны, и комплексных, если хотя бы одно из пространств комплексное).
Если Y = A(X) , то говорят, что Y — образ вектора X , а X — прообраз вектора Y при отображении A . Пространство V называется областью определения отображения A .
Tip
Образно говоря, свойство линейности отображения заключается в том, что при этом отображении образ суммы любых двух векторов совпадает с суммой образов этих векторов, а произвольное растяжение прообраза влечет за собой сообразное же растяжение образа
Примеры линейных отображений#
Пример 1. Рассмотрим линейное пространство полиномов степени не выше n :
в это же множество включаем и тождественно нулевой полином (для которого степень не определяется). Операция нахождения частного и операция нахождения остатка от деления полинома p(x) на заданный фиксированный полином g(x) \in \mathbb{R}[x] , g(x) \neq 0 , являются линейными отображениями пространства P_n . Если
при \deg r_j(x) < \deg g(x) , то
Фактически, операция деления на g(x) (с остатком) порождает два разных линейных отображения. Если \deg g(x) = m при 0 < m \leq n , то операция нахождения остатка — это отображение P_n \longrightarrow P_{m-1} , а операция нахождения частного — это
Пример 2. В том же линейном пространстве P_n операция дифференцирования
является отображением P_n в P_{n-1} , линейным, поскольку
Прообраз любого элемента P_{n-1} неединствен:
Пример 3. Операцию нахождения первообразной:
a_0 x^n + a_1 x^{n-1} + \dots + a_n \longmapsto \frac{a_0}{n+1} x^{n+1} + \frac{a_1}{n} x^n + \dots + a_n x
тоже можно рассматривать как линейное отображение P_n \longrightarrow P_{n+1} . При этом прообраз каждого полинома из P_{n+1} (если существует) будет единствен.
Пример 4. Рассмотрим линейное отображение \mathbb{R}^3 \longrightarrow \mathbb{R}^3 :
задает ортогональную проекцию вектора X = (x, y, z) на плоскость z = 0 . Можно рассматривать его и как отображение \mathbb{R}^3 \longrightarrow \mathbb{R}^2 .
Проецирование же на произвольное подпространство может быть задано с помощью матрицы. Так, например, отображение
задает ортогональную проекцию вектора X на многообразие x + y + z = 0 .
Свойства линейных отображений#
В настоящем пункте O означает нулевой вектор пространства V , а O' — нулевой вектор пространства W .
Два линейных отображения A и B из V в W называются равными, если A(X) = B(X) для любого X \in V . Нулевое отображение определяется условием O(X) = O' для всех X \in V .
Теорема 1. Для любого линейного отображения A(X) :
- а) A(O) = O' ;
- б) если система \{X_1, \dots, X_k\} линейно зависима, то и система \{A(X_1), \dots, A(X_k)\} линейно зависима;
- в) если система \{A(X_1), \dots, A(X_k)\} линейно независима, то и система \{X_1, \dots, X_k\} линейно независима.
Теорема 2. Линейное отображение отображает произвольное линейное многообразие пространства V в линейное же многообразие пространства W .
Доказательство: Если M = X_0 + L(X_1, \dots, X_k) = \{ X_0 + \alpha_1 X_1 + \dots + \alpha_k X_k \mid (\alpha_1, \dots, \alpha_k) \in \mathbb{R}^k \} , то свойство линейности отображения A дает:
Заметим, что в соответствии с теоремой 1 можно утверждать, что линейное отображение не увеличивает размерности отображаемого многообразия: \dim A(M) \leq \dim M . ♦
=> Линейное отображение отображает произвольную прямую пространства V в прямую или точку пространства W .
Теорема 3. Пусть \{X_1, \dots, X_n\} — произвольный базис V , а Y_1, \dots, Y_n — произвольные векторы из W . Существует единственное линейное отображение A: V \longrightarrow W такое, что A(X_1) = Y_1, \dots, A(X_n) = Y_n .
Note
Иными словами: любое линейное отображение пространства V в другое пространство однозначно определяется его заданием на базисных векторах пространства V.
Доказательство: Поскольку векторы X_1, \dots, X_n — базисные, то существует и единственно разложение любого X \in V : X = x_1 X_1 + \dots + x_n X_n . Зададим отображение A: V \longrightarrow W формулой
Легко проверить свойство его линейности. Кроме того:
т.е. оно удовлетворяет условиям теоремы.
Предположим теперь, что существует еще одно отображение B(X) , удовлетворяющее этим условиям: B(X_j) = Y_j . Тогда
и, на основании определения, A(X) = B(X) . ♦
Отображение S: V \longrightarrow W называется суммой линейных отображений A и B , если
Отображение F: V \longrightarrow W называется произведением линейного отображения A на число (скаляр) \lambda \in \mathbb{R} , если
Ядро и образ линейного отображения#
Для линейного отображения A его ядром называется множество векторов из V , отображающихся в O' \in W :
А его образом называется множество всех векторов из W , для каждого из которых существует прообраз из V :
Теорема 1. \text{Ker}(A) и \text{Im}(A) являются линейными подпространствами соответствующих пространств.
Для линейного отображения A его дефектом называется размерность ядра, а его рангом — размерность образа:
Отображение называется невырожденным, если
Теорема 2. Линейное отображение A невырождено тогда и только тогда, когда у каждого образа существует единственный прообраз.
Доказательство.
- Необходимость: Если A невырождено, то \text{Ker}(A) = \{ O \} , т.е. единственным вектором из V , отображающимся в O' \in W , должен быть O . Если бы существовали два различных вектора X_1 и X_2 , такие что A(X_1) = A(X_2) , то их разность должна быть в ядре, что противоречит предположению.
- Достаточность: Если прообраз для каждого Y \in W единственен, то ядро не может содержать ненулевых векторов, иначе существует вектор X \neq O , для которого A(X) = O' , что противоречит условию.
Теорема 3. Если \{ X_1, \dots, X_n \} — произвольный базис V , то
Пример. Найти ядро и образ отображения A: \mathbb{R}^3 \to \mathbb{R}^4 , заданного формулой:
Решение. Для определения \text{Ker}(A) найдем фундаментальную систему решений системы уравнений:
Решая систему, получаем:
Таким образом, \text{Ker}(A) = L(X_1) , и дефект A равен 1:
Теперь для нахождения \text{Im}(A) воспользуемся теоремой 3. Базис следует искать среди векторов:
Итак, \text{Im}(A) = L(Y_1, Y_3) , и ранг A равен 2:
Матрица линейного отображения#
Рассмотрим линейное отображение A: V \to W , и пусть \{X_1, \dots, X_n\} — базис V , а \{Y_1, \dots, Y_m\} — базис W . Найдем координаты векторов A(X_1), \dots, A(X_n) в базисе \{Y_1, \dots, Y_m\} :
Матрица A с размерами m \times n , по столбцам которой стоят координаты образов базисных векторов, называется матрицей линейного отображения A в выбранных базисах:
Почему запись координат в матрицу производится по столбцам? Казалось бы, естественней ставить их по строкам. Объяснение этому решению будет дано ниже.
Теорема. Координаты произвольного вектора#
Пусть X = x_1 X_1 + \dots + x_n X_n и его образ A(X) = y_1 Y_1 + \dots + y_m Y_m связаны формулой:
Вот именно для этой последней формулы необходимо было «транспонировать» запись матрицы линейного отображения в начале настоящего пункта.
Доказательство. С помощью приведенных выше формул для A(X_1), \dots, A(X_n) получаем:
откуда и следует утверждение теоремы. \square
Пример. Найти матрицу линейного отображения#
Для отображения:
в стандартных базисах пространств \mathbb{R}^3 и \mathbb{R}^4 :
- e_1 = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} ,
- e_2 = \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix} ,
- e_3 = \begin{pmatrix} 0 \\ 0 \\ 1 \end{pmatrix} ,
и для \mathbb{R}^4 :
- E_1 = \begin{pmatrix} 1 \\ 0 \\ 0 \\ 0 \end{pmatrix} ,
- E_2 = \begin{pmatrix} 0 \\ 1 \\ 0 \\ 0 \end{pmatrix} ,
- E_3 = \begin{pmatrix} 0 \\ 0 \\ 1 \\ 0 \end{pmatrix} ,
- E_4 = \begin{pmatrix} 0 \\ 0 \\ 0 \\ 1 \end{pmatrix} .
Решение:
Матрица отображения A в выбранных базисах:
Она совпадает с матрицей коэффициентов при переменных x_1, x_2, x_3 в выражениях координат вектора A(X) . \square
Линейный оператор#
Линейное отображение линейного (векторного) пространства V в себя A : V \to V называется линейным преобразованием V или линейным оператором на V .
В дальнейшем под выражением оператор понимается исключительно линейный оператор (и линейное пространство V предполагается конечномерным!).
Свойства линейности:
-
Аддитивность:
-
Однородность (гомогенность):
Или, в эквивалентном виде:
где \forall \, X_1, X_2 \in V , \forall \, \alpha_1, \alpha_2 \in \mathbb{R} или \mathbb{C} (в зависимости от того, вещественное ли пространство V , или комплексное).
Примеры линейных операторов#
Пример 1. В пространстве \mathbb{R}^3 рассмотрим следующие действия над вектором (x, y, z) :
- Поворот вокруг прямой x = y = 2z на угол \frac{\pi}{3} ;
- Зеркальное отражение относительно плоскости 3x - y + z = 0 ;
- Растяжение в 3.14 раза.
Все это — примеры линейных операторов. Однако отображение сдвига:
не является линейным оператором, поскольку:
Пример 2. Задачу интерполяции можно интерпретировать как построение некоторого отображения. В интерполяционной таблице
будем считать узлы \{ x_j \}^n_{j=1} фиксированными, а значения \{ y_j \}^n_{j=1} — переменными. Эта таблица однозначно определяет интерполяционный полином:
со свойством f(x_j) = y_j при j \in \{ 1, \dots, n \} . При этом \{ A_j \}^n_{j=0} \subset \mathbb{C} . Будет ли получившееся отображение
оператором на \mathbb{C}^n ? Покажем, что отображение
является линейным отображением. Действительно, решением задачи интерполяции для таблицы
при \alpha \in \mathbb{C} является полином \alpha f(x) . Если же, вдобавок, решением задачи интерполяции для таблицы
является полином g(x) \in \mathbb{C}[x] , \deg g(x) \leq n-1 , то решением задачи интерполяции для таблицы
будет полином f(x) + g(x) , и этот полином будет единственным решением среди полиномов степеней \leq n-1 . Таким образом, линейность отображения A установлена.
Далее, множество P_{n-1} полиномов из \mathbb{C}[x] степеней \leq n-1 изоморфно пространству \mathbb{C}^n . Следовательно, «сложное» отображение
является линейным отображением из \mathbb{C}^n в \mathbb{C}^n , т.е. оператором на \mathbb{C}^n .
Матрица оператора#
Рассмотрим оператор A на V и пусть \{X_1, \dots, X_n\} — базис V. Являясь частным случаем линейного отображения, оператор должен обладать и соответствующей матрицей. Существенной особенностью, отличающей наш случай от рассмотренного в пункте ☞ МАТРИЦА ЛИНЕЙНОГО ОТОБРАЖЕНИЯ, является невозможность произвола при выборе базиса для Im(A). Поскольку Im(A) является подпространством V, то было бы слишком большой роскошью иметь два разных базиса для одного и того же пространства.
Найдем координаты образов базисных векторов A(X_1), \dots, A(X_n) в том же базисе \{X_1, \dots, X_n\}:
Матрица A =
в столбцах которой стоят координаты образов базисных векторов, называется матрицей оператора A в базисе \{X_1, \dots, X_n\}.
Пример.#
Известны образы базисных векторов R³ под действием оператора A:
Найти матрицу этого оператора в исходном базисе.
Решение. Элементы матрицы A ищутся по формулам из определения, которые можно переписать в матричном виде:
Откуда:
И для нашего примера эта формула дает:
Теорема.#
Если C — матрица перехода от старого базиса к новому, то матрицы A и B оператора в старом и новом базисах связаны формулой:
Доказательство. Пусть \{X_1, \dots, X_n\} — старый базис, \{Y_1, \dots, Y_n\} — новый базис, и разложения вектора X и его образа Y в этих базисах имеют вид:
На основании результатов ☞ ПУНКТА, имеем:
Получаем цепочку равенств:
Равенство имеет место для любого столбца, и, в частности, для столбцов:
Объединяя эти n равенств в одно матричное, получим:
откуда и следует доказываемое.
!! note Теорема
Оператор обратим тогда и только тогда, когда его определитель отличен от нуля.
Теорема
Линейное пространство Hom(V, V) операторов на V, \text{dim} V = n, изоморфно линейному пространству квадратных матриц порядка n (с элементами из R или из C).
Теорема
В любом базисе пространства:
а) матрица нулевого оператора O является нулевой матрицей O, а матрица тождественного оператора E является единичной матрицей E; обратно: если матрица оператора в этом базисе — нулевая (единичная), то оператор является нулевым (соответственно, тождественным);
б) матрица произведения операторов совпадает с произведением матриц этих операторов;
в) коммутирующим операторам соответствуют коммутирующие матрицы;
Оператор в евклидовом пространстве#
Каков "физический" смысл определителя оператора?
Пусть на плоскости \mathbb{R}^2 задано стандартное скалярное произведение. Рассмотрим оператор, отображающий векторы по правилу
Свойство линейности оператора как отображения плоскости проявляется в том, что параллельные отрезки он отображает в параллельные же отрезки и, следовательно, любой параллелограмм отображается им в параллелограмм.
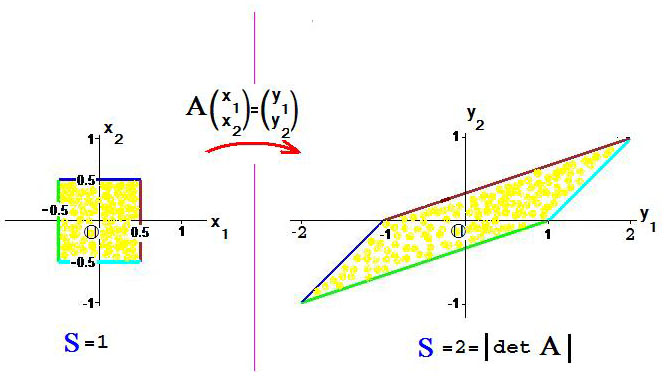
Площади соответствующих параллелограммов оказываются связанными через определитель матрицы — более точно, через модуль этого определителя. Причем этот результат не зависит от расположения отображаемой фигуры: коэффициент растяжения будет одинаков в любом месте плоскости.
В рассмотренном примере это проверяется непосредственно; что касается обобщения на произвольное евклидово пространство, в котором понятие объема вводится аксиоматически то справедлив следующий результат.
Оператор свертки#
Свертка (англ. convolution) — операция над парой матриц A (размера n_x \times n_y) и B (размера m_x \times m_y), результатом которой является матрица C = A * B размера (n_x - m_x + 1) \times (n_y - m_y + 1). Каждый элемент результата вычисляется как скалярное произведение матрицы B и некоторой подматрицы A такого же размера (подматрица определяется положением элемента в результате). То есть,
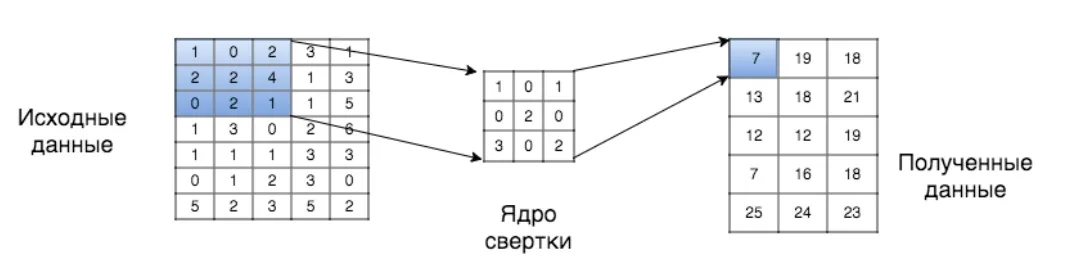
На Рисунке можно видеть, как матрица B «двигается» по матрице A, и в каждом положении считается скалярное произведение матрицы B и той части матрицы A, на которую она сейчас наложена. Получившееся число записывается в соответствующий элемент результата.
Логический смысл свертки такой — чем больше величина элемента свертки, тем больше эта часть матрицы A была похожа на матрицу B (похожа в смысле скалярного произведения). Поэтому матрицу A называют изображением, а матрицу B — фильтром или ядром.
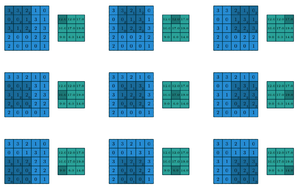
Анимация:

Матрица B:
Процесс свертки:
- Начинаем с того, что матрица B "накладывается" на верхний левый угол матрицы A.
- Складываем произведения элементов из B и соответствующих элементов из A. Получаем число, которое записываем в элемент результата.
- Затем B "сдвигается" по матрице A, и процесс повторяется для каждой позиции.
Зачем оно нам надо?#
Математическое обоснование оператора Прюитта#
Оператор Прюитта представляет собой дискретное приближение производных изображения, полученное методом конечных разностей. Его математическое обоснование можно описать следующим образом:
1. Фундамент идеи#
Пусть функция f(x,y) описывает яркость изображения. Тогда её частные производные по x и y можно аппроксимировать центральными конечными разностями:
Однако, вместо простого вычитания, для повышения устойчивости к шуму и учета соседних пикселей используется свёрточная маска.
2. Вывод масок оператора#
Для приближения производной по x оператор Прюитта использует ядро:
а для производной по y – ядро:
Каждое из этих ядер можно интерпретировать как операцию свёртки с изображением, где суммирование по строкам или столбцам выполняет усреднение, а разность между «правой» и «левой» (или «нижней» и «верхней») группами пикселей – приближает производную.
3. Математическая интерпретация#
Если рассматривать свёртку ядра G_x с изображением, то для центрального пикселя получается:
Это соответствует сумме разностей яркостей справа и слева, что является приближением f_x(x,y) . Аналогично для G_y свёртка дает приближение f_y(x,y) .
4. Оценка градиента#
После вычисления приближённых значений производных по x и y часто вычисляют величину градиента:
а направление градиента определяется как
Таким образом, математическое доказательство корректности оператора Прюитта базируется на идее аппроксимации непрерывных производных методом центральных конечных разностей с усреднением по окрестности пикселя, что реализовано через свёрточные ядра.
Некоторые другие полезные опраторы на основе Свертки#
- Фильтр Гаусса (Gaussian Filter):
Этот фильтр используется для сглаживания изображений, уменьшения шума и устранения мелких деталей. Он работает путем применения Гауссовой функции к изображению.
Формула фильтра Гаусса:
Где:
- σ — стандартное отклонение,
- x, y — координаты пикселя.
Этот фильтр помогает в задачах, таких как детектирование контуров и распознавание объектов.
- Фильтр Собеля (Sobel Filter):
Фильтр Собеля используется для нахождения градиента изображения, что помогает в выделении границ объектов. Оператор включает два фильтра: один для выделения горизонтальных границ, а другой — для вертикальных.
Горизонтальный фильтр:
Вертикальный фильтр:
Суммарный градиент вычисляется как:
- Фильтр Робертса (Roberts Cross Filter):
Фильтр Робертса используется для детектирования краев, особенно в случае малых изменений интенсивности на изображении. Этот оператор работает с малыми матрицами и вычисляет градиент изображения в диагонах.
Горизонтальный фильтр:
Вертикальный фильтр:
- Фильтр Шарра (Scharr Filter):
Этот фильтр является модификацией фильтра Собеля и используется для более точного вычисления градиента изображения, особенно для выделения горизонтальных и вертикальных границ.
Горизонтальный фильтр:
Вертикальный фильтр:
Фильтр Шарра более чувствителен к изменениям и дает лучшие результаты для контуров.
Операторы Эрозии и Дилатации#
Морфологические операторы:
Эти операторы используются для обработки изображений, которые содержат бинарные данные, например, при обработке контуров объектов.
- Эрозия (Erosion): уменьшает размер объекта в изображении, вытесняя пиксели объекта за пределы.
- Дилатация (Dilation): увеличивает размер объекта, расширяя его границы.
Благодарности и список использованных источников#
- Многие материалы были заимстованы у Утешева Алексея Юрьевича из (Интерактивной информационно-консультационной среды)[https://cx53922.tmweb.ru/vf5/mapping]