Лекция 3 Изоморфизм линейных пространств. Метрические, нормированные, Евклидовы пространства. Собственные вектора.#
Как мы знаем линейных пространств можно придумать довольно много, причем некоторые эти линейные пространства каким-то образом взаимосвязаны с другими.
Так, на практике мы заметили, что система уравнений соотвествует некоторой матрице. Попробуем обобщить наши наблюдения в некоторой математической форме.
Изоморфизм линейных пространств#
Пусть имеются два линейных пространства разной природы:
V с операцией + и W с операцией ⊞. Может оказаться так, что эти пространства «очень похожи», и свойства одного получаются простым «переводом» свойств другого.
Говорят, что пространства V и W изоморфны, если между множествами их элементов можно установить такое взаимно-однозначное соответствие, что если X ↔ X′ и Y ↔ Y′, то X + Y ↔ X′ ⊞ Y′ и λX ↔ λX′.
=>
При изоморфизме пространств V и W нулевому вектору одного пространства будет соответствовать нулевой вектор другого пространства.
Пример 1
Пространство **Rⁿ** изоморфно пространству **Pⁿ⁻¹**. В самом деле, изоморфизм устанавливается соответствием: [a₁, …, aₙ] ↔ a₁ + a₂x + ⋯ + aₙxⁿ⁻¹
Пример 2
Пространство **Rᵐˣⁿ** вещественных матриц порядка **m × n** изоморфно пространству **Rᵐⁿ**. Изоморфизм устанавливается с помощью операции векторизации матрицы (матрица «вытягивается» в один столбец).
Примечание: Понятие изоморфизма вводится для того, чтобы исследование объектов, возникающих в различных областях алгебры, но с «похожими» свойствами операций, вести на примере одного образца, отрабатывая на нем результаты, которые можно будет потом дешево тиражировать.
Теорема#
Формулировка
Любое векторное пространство **V** размерности **d** изоморфно **Rᵈ**.
Доказательство
Изоморфизм можно установить следующим соответствием. Если {X₁, …, Xᵈ} — какой-то базис V, то вектору X ∈ V поставим в соответствие набор его координат в этом базисе:
X = x₁X₁ + ⋯ + xᵈXᵈ⇒ X ↦ [x₁, …, xᵈ] ∈ Rᵈ.
Исхожя из того факта, что Если dimV=d>0, то любая система из d линейно независимых векторов пространства образует базис этого пространства такое соответствие будет взаимно-однозначным, а проверка двух свойств изоморфизма тривиальна.
Примечание: Последний результат позволяет свести исследование свойств произвольного линейного пространства V к исследованию свойств пространства Rᵈ. Лишь бы только удалось нам найти базис пространства V, а также разложение произвольного вектора по этому базису. Однако некоторые теоретические заключения можно сделать, основываясь только лишь на фактах принципиального существования базиса и возможности разложения по нему произвольного вектора.
Метрическое пространство#
Рассмотрим произвольное множество X. Функция ρ : X × X → [0, +∞) называется метрикой, если выполнены следующие три условия:
- ρ(x, y) = 0 тогда и только тогда, когда x = y;
- ρ(x, y) = ρ(y, x) для ∀ x, y ∈ X;
- ρ(x, y) ≤ ρ(x, z) + ρ(z, y) для ∀ x, y, z ∈ X. Свойство 3 называется
неравенством треугольника.
Пара (X, ρ) называется метрическим пространством.
Метрика — это расстояние между элементами. Из определения следует, что метрическое пространство представляет собой произвольное множество с введённой на всевозможных упорядоченных парах элементов этого множества функцией, значение которой на данной паре считается расстоянием между элементами этой пары. Никакого дополнительного уточнения свойств множества X не требуется.
Приведём примеры метрических пространств.
Пример 1.
Рассмотрим любое множество X. Если ввести на множестве пар элементов множества X функцию ρ, для которой:
- ρ(x, y) = 1 при x ≠ y,
- ρ(x, x) = 0 при всех x, y ∈ X,
то для неё выполнены все свойства метрики, поэтому (X, ρ) является метрическим пространством. Оно называется дискретным метрическим пространством, а сама метрика ρ называется дискретной.
В частности, в качестве множества X можно взять множество всех натуральных чисел N. В таком случае, если два числа не равны, то значение ρ на них равно 1, а в противном случае — нулю.
Пример 2.
Рассмотрим множество R² всех пар действительных чисел. Как известно, R² является векторным пространством, поэтому его элементы будем обозначать жирным шрифтом. Если x = (x₁, x₂), а y = (y₁, y₂), где xᵢ, yᵢ ∈ R, i = 1, 2, то можно ввести метрику:
ρ₁(x, y) = |x₁ − y₁| + |x₂ − y₂|.
Напомним, что на лекциях по линейной алгебре мы ввели норму на пространстве R², которая задавалась равенством:
∥x∥₁ = |x₁| + |x₂|.
Легко видеть, что:
ρ₁(x, y) = ∥x − y∥₁.
Все свойства метрики легко проверяются. Свойство 3, например, следует из неравенства треугольника для норм, которое доказывалось на линейной алгебре:
ρ₁(x, y) = ∥x − y∥₁ = ∥x − z + z − y∥₁ ≤ ∥x − z∥₁ + ∥z − y∥₁ = ρ₁(x, z) + ρ₁(z, y).
Пример 3.
Можно, однако, ввести на R² метрику с помощью формулы, которая в аналитической геометрии задаёт расстояние между двумя точками с координатами (x₁, x₂) и (y₁, y₂), а именно:
ρ₂(x, y) = √((x₁ − y₁)² + (x₂ − y₂)²).
Эта метрика получается из евклидовой нормы ∥x∥₂ = √(x₁² + x₂²), которую мы ввели на линейной алгебре. То, что функция ρ₂ действительно является метрикой, проверяется, как и для ρ₁ в предыдущем пункте.
Примечание: Таким образом, мы видим, что на одном и том же множестве можно задавать разные метрики.
Понятие нормы#
В примерах 2 и 3 мы использовали понятие векторного пространства, поэтому необходимо вспомнить это определение из курса линейной алгебры. Таким образом, множество X из определения метрического пространства рассматривалось с некоторыми ограничениями, так как мы указали, что это не просто произвольное множество, а векторное пространство.
На всякий случай напомним определение нормы, которое давалось в курсе линейной алгебры.
Пусть V — линейное пространство. Функция | · | : V → [0, +∞) называется нормой, если выполнены следующие условия:
1) | v | = 0 если и только если v = 0, то есть вектор v является нейтральным элементом векторного пространства V.
2) Для любого вещественного (или комплексного) числа λ и любого вектора v ∈ V выполнено равенство | λ v | = |λ| | v |.
3) Для любых x, y ∈ V выполнено неравенство треугольника: | x + y | ≤ | x | + | y |.
Линейное пространство V с введённой на нём нормой обозначается (V, |·|) и называется нормированным пространством.
Любое нормированное пространство можно сделать метрическим с метрикой ρ, задаваемой равенством:
ρ(x, y) = ∥x − y∥
Норма вводится только на векторных пространствах, поэтому класс нормированных пространств содержится в классе метрических.
Нормированное пространство#
Пусть в линейном пространстве V определена функция, которая ставит в соответствие каждому вектору X ⊂ V вещественное число, называемое нормой вектора и обозначаемое ∥X∥; при этом функция подчиняется аксиомам:
- если ∥X∥ = 0, то X = O;
- ∥X + Y∥ ≤ ∥X∥ + ∥Y∥ для ∀ {X, Y} ⊂ V (неравенство треугольника);
- ∥αX∥ = |α| ⋅ ∥X∥ для ∀ X ∈ V и ∀ α ∈ R, если пространство вещественно, и ∀ α ∈ C, если оно комплексно (однородность нормы).
Пространство V с введенной в нем нормой называется нормированным (линейным) пространством.
Из этих аксиом вытекает следующее свойство нормы, которое часто включают в состав аксиом.
Теорема
Любая норма должна быть неотрицательной функцией: ∥X∥ ≥ 0 для ∀ X ∈ V.
Док-во:
Действительно, из аксиомы 3 вытекает, что норма нулевого вектора должна быть равна 0:
∥O∥ = ∥0 ⋅ O∥ = 0 ∥O∥ = 0.
Из аксиом 2 и 3 тогда следует:
0 = ∥O∥ = ∥X - X∥ ≤ ∥X∥ + ∥-X∥ = 2∥X∥ => ∥X∥ ≥ 0 для ∀ X ∈ V.
В широком классе вещественных пространств норма может быть введена естественным образом.
Примечание: При этом любое нормированное пространство является метрическим, потому что можно взять вектор, соединяющий две точки, посмотреть на его длину и называть её расстоянием.
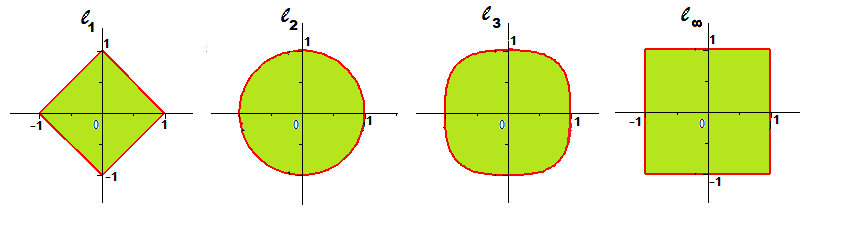
Различные способы задания нормы в одном и том же линейном пространстве порождают различные формы окрестности вектора (точки) этого пространства. Для примера изобразим 1-окрестность начала координат в R² (``единичный круг''):
Норма матрицы#
Любую матрицу A порядка m × n с вещественными или комплексными элементами можно векторизовать, т.е. считать её вектором из Rᵐⁿ или из Cᵐⁿ. Любая норма, введённая в этих пространствах, породит и норму в линейном пространстве матриц.
Для матрицы A ∈ Cᵐˣⁿ евклидова норма вводится формулой:
∥A∥ₓ = √∑ₖₖ |aₖₖ|².
С использованием операции вычисления следа матрицы, эту формулу для вещественных матриц можно переписать в виде:
∥A∥ₓ = √Sp(A ⋅ Aᵀ) = √Sp(AᵀA).
Евклидово пространство#
Вещественное линейное пространство E называется евклидовым, если в этом пространстве определена функция, ставящая в соответствие паре векторов {X, Y} ⊂ E вещественное число, называемое скалярным произведением векторов X и Y, и обозначаемое ⟨X, Y⟩ или (X, Y). При этом функция подчиняется аксиомам:
- ⟨X, Y⟩ = ⟨Y, X⟩ для {X, Y} ⊂ E;
- ⟨X₁ + X₂, Y⟩ = ⟨X₁, Y⟩ + ⟨X₂, Y⟩ для {X₁, X₂, Y} ⊂ E;
- ⟨λX, Y⟩ = λ⟨X, Y⟩ для {X, Y} ⊂ E, λ ∈ R;
- ⟨X, X⟩ > 0 для ∀X ≠ O, ⟨O, O⟩ = 0.
Из аксиом 1 и 2 вытекает свойство линейности скалярного произведения и по второму вектору:
2'. ⟨X, Y₁ + Y₂⟩ = ⟨X, Y₁⟩ + ⟨X, Y₂⟩ для {X, Y₁, Y₂} ⊂ E.
Пример
Линейное пространство Rⁿˣⁿ вещественных квадратных матриц порядка n. Скалярное произведение введем формулой:
На основании аксиом скалярного произведения, его вычисление для произвольных векторов X и Y может быть сведено к вычислению скалярных произведений векторов произвольного базиса. В самом деле, если система \{ X_1, \dots, X_n \} составляет базис пространства E, то, разложив оба вектора по этому базису
и
получаем:
Таким образом, выражение для скалярного произведения можно записать в матричной форме как:
Итак, при изменении векторов X и Y в последней формуле изменяются только строка и столбец координат, а промежуточная матрица остаётся неизменной. Задание этой матрицы, следовательно, полностью определяет скалярное произведение в E. Фактически, задание скалярного произведения в разобранном выше примере пространства R^n по формуле
можно рассматривать как частный случай этого при подходящем подборе базисных векторов.
Неравенство Коши-Буняковского#
Неравенство Коши-Буньяковского является важным математическим результатом в линейной алгебре и теории векторных пространств. Оно выражает связь между скалярным произведением двух векторов и их длинами.
Пусть X и Y — два вектора в евклидово пространство (или пространство с внутренним произведением). Тогда выполняется неравенство Коши-Буньяковского:
где:
- \langle X, Y \rangle — скалярное произведение векторов X и Y ,
- |X| и |Y| — длины (нормы) векторов X и Y , то есть |X| = \sqrt{\langle X, X \rangle} и |Y| = \sqrt{\langle Y, Y \rangle} .
Доказательство неравенства Коши-Буньяковского часто выполняется с использованием метода неравенства Дженсона или неравенства для квадратичных форм.
- Рассмотрим произвольное скалярное произведение:
- Это выражение можно записать как:
- Из этого выражения можно показать, что скалярное произведение между двумя векторами всегда меньше либо равно произведению их длин, что и соответствует неравенству.
Геометрический смысл
Неравенство Коши-Буньяковского можно интерпретировать геометрически: оно утверждает, что абсолютное значение скалярного произведения двух векторов не может превышать произведение их длин. Это означает, что угол между двумя векторами не может быть больше \( 90^\circ \), и наибольшее значение скалярного произведения достигается, когда два вектора коллинеарны, то есть лежат на одной прямой.
Углом между векторами#
Определение: Углом между векторами X и Y называется угол
В силу неравенства Коши-Буняковского, данное определение непротиворечиво: выражение под знаком арккосинуса всегда находится в диапазоне [-1, 1].
Векторы X и Y называются ортогональными, если угол между ними равен \frac{\pi}{2} , что эквивалентно:
Данное определение является естественным обобщением понятия угла на плоскости и в трёхмерном пространстве. Хотя человеческий мозг не привык работать с размерностями, превышающими 3, эта абстракция находит практическое применение, например, в задачах информационного поиска и анализа данных.
Ортоганилзация#
Пусть \dim E = n и векторы \{ X_1, \dots, X_n \} составляют базис E . Этот базис называется ортогональным, если векторы попарно ортогональны: X_j \perp X_k для j \neq k .
Базис называется нормированным, если каждый его вектор имеет единичную длину: |X_j| = 1 .
Базис называется ортонормированным, если он и ортогонален, и нормирован, то есть:
где \delta_{jk} — символ Кронекера.
Ортогональный базис будем обозначать как E_1, \dots, E_n .
Вопрос: Чему равно расстояние между двумя векторами ортонормированного базиса?
В пространстве \mathbb{R}^n стандартным ортогональным базисом является базис, состоящий из векторов:
Существование ортогонального базиса в произвольном евклидовом пространстве требует дополнительного доказательства.
Теорема
Если ненулевые векторы X_1, \dots, X_n попарно ортогональны, то они линейно независимы.
Доказательство
Предположим, что векторы линейно зависимы, т.е. существует линейная комбинация:
Пусть домножим это равенство скалярно на X_1 :
Поскольку \langle X_1, X_j \rangle = 0 для j \in \{2, \dots, n\} , получаем:
Так как X_1 \neq O , то \langle X_1, X_1 \rangle \neq 0 , следовательно, \lambda_1 = 0 .
Аналогично можно доказать, что \lambda_j = 0 для всех j , что противоречит предположению о линейной зависимости.
Таким образом, векторы X_1, \dots, X_n линейно независимы.
Введение в идею Собственных векторов и чисел#
Рассмотрим произвольную квадратную матрицу, например:
И умножим данную матрицу справа на какой-нибудь подходящий столбец.
Мне пришёл в голову вектор:
Вроде ничего примечательного — умножили матрицу A на вектор-столбец b и получили другой вектор-столбец:
Обычная векторная жизнь. Но в обществе таких векторов существуют особые представители, которые обладают внутренним стержнем и не желают изменять себе в трудные минуты.
Возьмём вектор:
Выполним умножение:
На последнем шаге вынесли константу:
Что произошло?
В результате умножения матрицы A на вектор v , данный вектор «восстал из пепла» с числовым коэффициентом \lambda = 2 .
Это и есть собственный вектор с соответствующим собственным значением.
Собственные вектора и числа#
Пусть A – квадратная матрица n -го порядка.
Ненулевой столбец
удовлетворяющий условию
называется собственным вектором матрицы A .
Число \lambda в равенстве (6.1) называется собственным значением матрицы A .
Говорят, что собственный вектор x соответствует (или принадлежит) собственному значению \lambda .
Поставим задачу нахождения собственных значений и собственных векторов матрицы.
Определение (6.1) можно записать в виде:
где E – единичная матрица n -го порядка.
Таким образом, условие (6.1) представляет собой однородную систему n линейных алгебраических уравнений с n неизвестными x_1, x_2, \dots, x_n :
Так как нас интересуют нетривиальные решения ( x \neq 0 ) однородной системы, то определитель матрицы системы должен быть равен нулю:
В противном случае, по правилу Крамера, система имеет единственное тривиальное решение x = 0 .
Задача нахождения собственных значений матрицы свелась к решению уравнения:
которое называется характеристическим уравнением матрицы A .
- Корни характеристического многочлена (характеристического уравнения (6.3)) и только они являются собственными значениями матрицы.
- По основной теореме алгебры характеристическое уравнение имеет n (в общем случае комплексных) корней (с учетом их кратностей).
- Собственные значения и собственные векторы существуют у любой квадратной матрицы.
- Собственные значения матрицы определяются однозначно (с учетом их кратности),
а собственные векторы — неоднозначно.
- Совокупность всех собственных значений матрицы (с учетом их кратностей) называется спектром матрицы.
- Спектр матрицы называется простым, если собственные значения матрицы попарно различны (все корни характеристического уравнения простые).
Свойства собственных векторов#
Пусть A – квадратная матрица n -го порядка.
- Собственные векторы, соответствующие различным собственным значениям, линейно независимы.
- Ненулевая линейная комбинация собственных векторов, соответствующих одному собственному значению, является собственным вектором, соответствующим тому же собственному значению.
Алгоритм нахождения собственных векторов и собственных значений матрицы#
Для нахождения собственных значений и собственных векторов квадратной матрицы
A порядка n необходимо выполнить следующие шаги:
- Составить характеристический многочлен матрицы:
-
Найти все различные корни \lambda_1, \dots, \lambda_k
характеристического уравнения \Delta_A (\lambda) = 0 .
Кратности корней n_1, n_2, \dots, n_k (где n_1 + n_2 + \dots + n_k = n )
определять не нужно. -
Для каждого собственного значения \lambda = \lambda_1
найти фундаментальную систему решений \varphi_1, \varphi_2, \dots, \varphi_{n - r}
однородной системы уравнений:
Здесь r = \operatorname{rg}(A - \lambda_1 E) .
Для решения этой системы можно использовать стандартные методы нахождения
фундаментальной матрицы.
- Записать линейно независимые собственные векторы матрицы A ,
отвечающие собственному значению \lambda_1 :
где C_1, C_2, \dots, C_{n - r} – произвольные ненулевые постоянные.
Совокупность всех собственных векторов, отвечающих \lambda_1 ,
образуют ненулевые столбцы вида:
В дальнейшем собственные векторы будем обозначать буквой s .
- Повторить шаги 3 и 4 для остальных собственных значений \lambda_2, \dots, \lambda_k .
Пример расчета#
Найти собственные значения и собственные векторы матрицы
- Нахождение собственных значений
Сначала составим характеристический многочлен матрицы:
Вычислим определитель:
Раскроем скобки:
Таким образом:
Приравниваем характеристический многочлен к нулю:
Вычислим дискриминант:
Находим собственные значения:
Отсюда:
- Нахождение собственных векторов
Для \lambda_1 = 7
Найдем собственный вектор v_1 , решая систему:
Упрощаем матрицу:
Запишем систему уравнений:
Из второго уравнения:
Выберем x_1 = 1 (произвольная ненулевая величина), тогда x_2 = -3 . Таким образом, собственный вектор:
Для \lambda_2 = 2
Найдем собственный вектор v_2 , решая систему:
Упрощаем матрицу:
Запишем систему уравнений:
Из первого уравнения:
Выберем x_2 = 1 , тогда x_1 = -2 . Таким образом, собственный вектор:
Итог
Собственные значения:
Собственные векторы: