Лекция 2 Базис линейного пространства. Координаты и преобразования координат в линейном пространстве#
Чтобы продолжить разговор необходимо доказать, что множество матриц образуют линейное пространство. Рассмотрим подробнее операции.
Линейные операции над матрицами#
Рассмотрим важные математические объекты — матрицы.
Матрицей размером m × n называется совокупность m · n чисел, расположенных в виде прямоугольной таблицы из m строк и n столбцов:
A =
или A = , i = 1, ..., m; j = 1, ..., n.
Числа, составляющие матрицу, называются элементами матрицы:
— элемент матрицы, стоящий на пересечении i-й строки и j-го столбца матрицы.
Всюду далее предполагается, что элементы матриц являются действительными числами, если не оговорено противное.
Пример 1.1. Определить размеры матриц:
A = ,
B = ,
c = ,
d =
Решение. Матрица A имеет размеры 3 × 2, а матрица B — 2 × 4, c — 1 × 3, d — 2 × 1.
Две матрицы A и B называются равными ( A = B ), если они имеют одинаковые размеры ( m \times n ) и равные соответствующие элементы:
Виды матриц#
В общем случае матрицу (размеров m \times n ) называют прямоугольной. В частности, если матрица состоит из одного столбца ( n = 1 ) или одной строки ( m = 1 ), то она называется матрицей-столбцом или матрицей-строкой (либо просто столбцом или строкой) соответственно. Матрицы-строки или матрицы-столбцы часто обозначают строчными буквами (в примере 1.1: C — строка, D — столбец).
Матрица размеров 1 \times 1 — это просто число (единственный элемент матрицы).

Если у матрицы количество строк ( m ) равно количеству столбцов ( n ), то матрицу называют квадратной ( n -го порядка).
Элементы
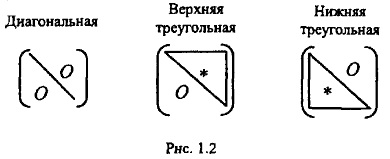
образуют главную диагональ квадратной матрицы (ей соответствует штриховая линия на рис. 1.1, соединяющая левый верхний угол матрицы a_{11} с правым нижним углом a_{nn} ).
Диагональ, соединяющая левый нижний угол ( a_{n1} ) с правым верхним углом ( a_{1n} ), называется побочной.
Квадратная матрица вида
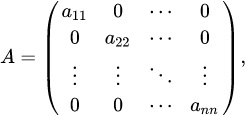
Матрица, у которой все элементы, стоящие вне главной диагонали, равны нулю, называется диагональной и обозначается
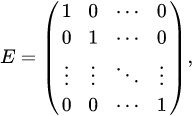
Частным случаем диагональной матрицы служит единичная матрица ( n -го порядка), которая обозначается E (или E_n ):
Сложение матриц#
Пусть A = (a_{ij}) и B = (b_{ij}) — матрицы одинаковых размеров m \times n .
Матрица C = (c_{ij}) тех же размеров m \times n называется суммой матриц A и B ,
если ее элементы равны сумме соответствующих элементов матриц A и B :
Сумма матриц обозначается:
Операция сложения матриц определена только для матриц одинаковых размеров и выполняется поэлементно:

Умножение матрицы на число#
Произведением матрицы \mathbf{A} = (a_{ij}) на число \lambda называется матрица \mathbf{C} = (c_{ij}) тех же размеров, что и матрица \mathbf{A} , каждый элемент которой равен произведению числа \lambda на соответствующий элемент матрицы \mathbf{A} :
Произведение обозначается λA или Aλ. Операция умножения матрицы на число выполняется поэлементно:
Умножить на число можно любую матрицу, при этом каждый ее элемент умножается на это число.
Матрица (-1) · A называется противоположной матрицей A и обозначается -A. Сумма матриц B и -A называется разностью матриц и обозначается B - A. Для нахождения разности матриц B - A следует из элементов матрицы B вычесть соответствующие элементы матрицы A. Вычитать можно только матрицы одинаковых размеров.
Свойства линейных операций над матрицами#
Операции сложения матриц и умножения матрицы на число называются линейными операциями над матрицами. Непосредственно из определений вытекают следующие свойства линейных операций.
Для любых матриц A, B, C одинаковых размеров и любых чисел α, β справедливы равенства:
- A + B = B + A (коммутативность сложения);
- (A + B) + C = A + (B + C) (ассоциативность сложения);
- существует нулевая матрица O (тех же размеров, что и A): A + O = A;
- существует матрица -A, противоположная матрице A: A + (-A) = O;
- α (A + B) = α A + α B;
- (α + β) A = α A + β A;
- (α β) A = α (β A);
Умножение матриц#
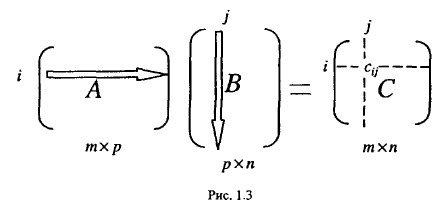
\textbf{Определение произведения матриц.} Пусть даны матрицы \mathbf{A} = (a_{ij}) размеров m \times p и \mathbf{B} = (b_{ij}) размеров p \times n . Матрицу \mathbf{C} размеров m \times n , элементы c_{ij} , которой вычисляются по формуле:
называют произведением матриц \mathbf{A} и \mathbf{B} и обозначают \mathbf{C} = \mathbf{A} \mathbf{B} . Операция умножения матрицы \mathbf{A} на матрицу \mathbf{B} определена только для согласованных матриц, у которых число столбцов матрицы \mathbf{A} равно числу строк матрицы \mathbf{B} :
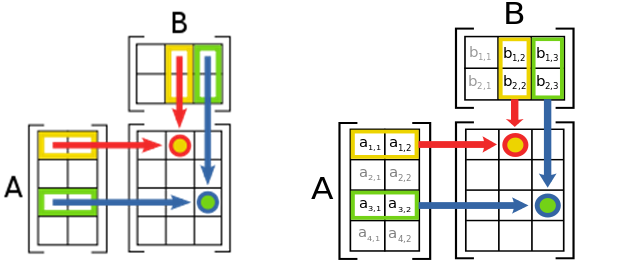
Рассмотрим подробнее процедуру нахождения произведения матриц. Чтобы получить элемент c_{ij}, стоящий на пересечении i-й строки и j-го столбца матрицы C, следует выделить i-ю строку матрицы A и j-й столбец матрицы B (рис. 1.3). Они содержат одинаковое число элементов, так как матрицы A и B согласованы. Затем найти сумму попарных произведений соответствующих элементов: первый элемент i-й строки умножается на первый элемент j-го столбца, второй элемент i-й строки умножается на второй элемент j-го столбца и т.д., а результаты перемножений складываются.
В произведении A · B матрицу A называют левым множителем для B и говорят об умножении матрицы B на матрицу A слева. Аналогично матрицу B называют правым множителем для A и говорят об умножении матрицы A на матрицу B справа.
Пример умножения:

Свойства умножения матриц#
Пусть λ — любое число, A, B, C — произвольные матрицы, для которых определены операции умножения и сложения, записанные в левых частях следующих равенств. Тогда определены операции, указанные в правых частях, и справедливы равенства:
- (AB)C = A(BC); (ассоциативность умножения матриц)
- A(B + C) = AB + AC; (дистрибутивность умножения)
- (A + B)C = AC + BC; (дистрибутивность умножения)
- λ(AB) = (λA)B.
Цветовое пространство, как линейное пространство#
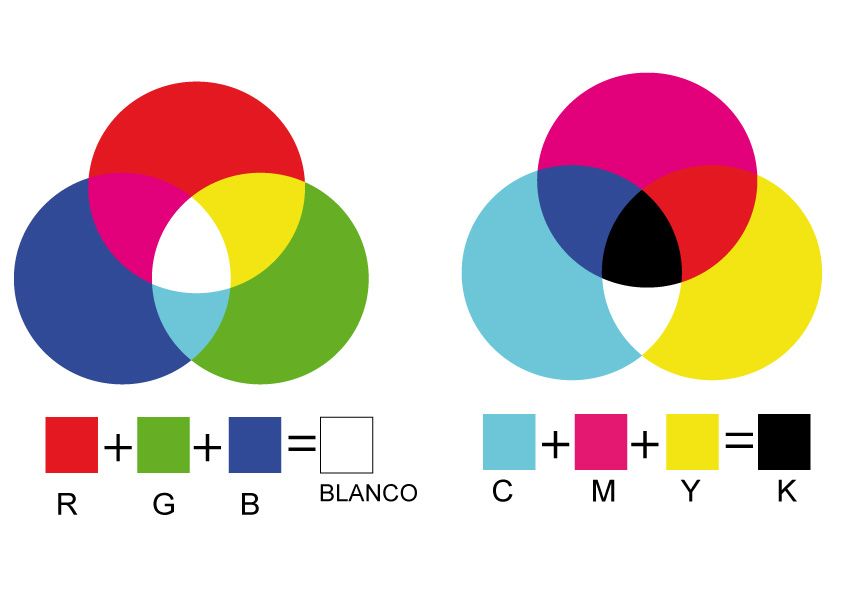
Замечательный пример трехмерного линейного пространства дает нам совокупность всех цветов. Под суммой двух цветов будем понимать цвет, образованный их смешением

Под умножением цвета на положительное число k — увеличение в k раз яркости цвета под умножением на (−1) — взятие дополнительного цвета.
Или в виде гифки
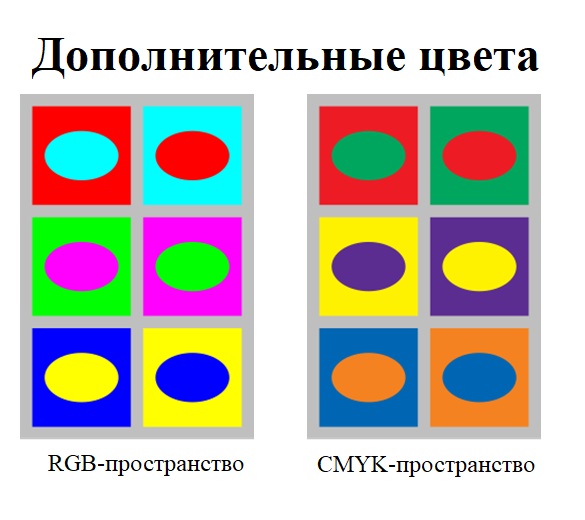
Что такое дополнительный цвет?
Дополнительные цвета — пары цветов (тонов хроматического спектра), оптическое смешение которых приводит к формированию психологического ощущения ахроматического тона (чёрного, белого или серого).
При этом оказывается, что совокупность всех цветов выражается линейно через три цвета: красный, зеленый и синий, т.е. образует трехмерное линейное пространство. (Точнее, некоторое тело в трехмерном пространстве, поскольку яркости цветов ограничены верхним порогом раздражения) Исследование этого трехмерного тела всех цветов является важным орудием цветоведения
Примечание: Строго говоря, сейчас в RGB пространстве любой цвет представим в виде комбинации трех значения Red, Green, Blue. Зададимся вопросом можно ли было выбрать иное сочетание цветов в качестве основы? Ответ - да. Приведем пример другой системы.
CMYK (Cyan, Magenta, Yellow, Key/Black) — это цветовая модель, основанная на использовании четырех цветов. В отличие от RGB, которая используется для отображения цвета на экранах, система CMYK предназначена для печати. В данной модели цвета создаются путем наложения четырех базовых пигментов: голубого (Cyan), пурпурного (Magenta), желтого (Yellow) и черного (Key). Система CMYK работает по принципу субтрактивного смешивания, то есть каждый последующий слой пигмента уменьшает количество света, отражаемого от поверхности.
Модель CMYK используется в печати, где цвета создаются путем наложения пигментов. При печати на бумаге важно, чтобы цвета не только правильно отображались, но и давали ожидаемый результат при взаимодействии с белым или не всегда белым фоном (бумагой), поэтому используется система субтрактивного смешивания.
- Принцип смешивания:
- RGB — аддитивное смешивание. Световые источники разных цветов (красный, зеленый, синий) комбинируются для создания других цветов.
-
CMYK — субтрактивное смешивание. При наложении пигментов на белую поверхность количество отраженного света уменьшается, что создаёт нужный цвет.
-
Применение:
- RGB используется для экранов (мониторов, телевизоров, смартфонов), где цвет создается путем изменения интенсивности света.
-
CMYK используется для печати, где смешивание пигментов на поверхности бумаги позволяет добиться нужного цвета.
-
Цветовой диапазон:
- RGB может создавать яркие и насыщенные цвета, что делает его подходящим для экранов.
- CMYK ограничен диапазоном печатных красок, что может привести к меньшей насыщенности цветов по сравнению с RGB.
Теперь, когда мы поняли, что системы отсчета могут быть заданы по-разному, попробуем формализировать наш интуитивный опыт.
Линейная зависимость#
Линейной комбинацией системы векторов
{X₁, ..., Xₘ}
называется произвольный вектор
α₁ X₁ + ... + αₘ Xₘ
при каких-то фиксированных значениях скаляров α₁, ..., αₘ.
Множество всевозможных линейных комбинаций системы векторов
{X₁, ..., Xₘ}
{α₁ X₁ + ... + αₘ Xₘ | (α₁, ..., αₘ) ⊆ ℝ}
называется линейной оболочкой векторов X₁, ..., Xₘ и обозначается L(X₁, ..., Xₘ). В англоязычной литературе обозначается
span(X₁, ..., Xₘ).
Теорема 1
Линейная оболочка векторов X1,…,Xm образует линейное подпространство пространства V.
Исходя из этого результата, часто о множестве L(X₁, ..., Xₘ) говорят как о подпространстве, натянутом на векторы X₁, ..., Xₘ.
Замечания
-
Один вектор v₁ тоже образует систему: при v₁ = o — линейно зависимую, а при v₁ ≠ o — линейно независимую.
-
Понятия линейной зависимости и линейной независимости для векторов определяются также, как для столбцов матриц. Поэтому все свойства, рассмотренные для столбцов матриц, переносятся на векторы. Применение свойств, доказанных для векторов, к столбцам, можно делать без обоснования, так как множество столбцов является линейным пространством.
Свойства линейно зависимых и независимых n-мерных векторов#
-
Если в систему векторов входит нулевой вектор, то она линейно зависима.
-
Если в системе векторов имеется два равных вектора, то она линейно зависима.
-
Если в системе векторов имеется два пропорциональных (коллинеарных) вектора (vᵢ = λ · vⱼ), то она линейно зависима.
-
Система из k > 1 векторов линейно зависима тогда и только тогда, когда хотя бы один из векторов есть линейная комбинация остальных.
-
Любые векторы, входящие в линейно независимую систему, образуют линейно независимую подсистему.
-
Система векторов, содержащая линейно зависимую подсистему, линейно зависима.
-
Если система векторов v₁, v₂, ..., vₖ — линейно независима, а после присоединения к ней вектора v — оказывается линейно зависимой, то вектор v можно разложить по векторам v₁, v₂, ..., vₖ и притом единственным образом, т.е. коэффициенты разложения находятся однозначно.
-
Пусть каждый вектор системы u₁, u₂, ..., uₘ может быть разложен по векторам системы v₁, v₂, ..., vₖ. Тогда, если m > k, то система векторов u₁, u₂, ..., uₘ — линейно зависима.
Докажем последнее свойство:
\text{Составим линейную комбинацию векторов } \mathbf{u}_1, \mathbf{u}_2, \dots, \mathbf{u}_m \text{ с коэффициентами } x_1, x_2, \dots, x_m \text{ и приравняем её нулевому вектору:}
\text{Надо показать, что эта линейная комбинация может быть нетривиальной, т.е. среди коэффициентов } x_i, \, i = 1, \dots, m \text{, можно взять числа, не равные нулю. Подставим в линейную комбинацию разложения векторов } \mathbf{u}_i \text{ по векторам системы } \mathbf{v}_1, \mathbf{v}_2, \dots, \mathbf{v}_k:
\text{Чтобы это равенство выполнялось, достаточно потребовать, чтобы}
\text{Таким образом, получаем однородную систему линейных уравнений:}
\text{где матрица } A = (a_{ji}) \text{ имеет размеры } k \times m. \text{Поскольку } m > k, \text{то система имеет бесконечно много решений, в том числе и ненулевых. Таким образом, линейная комбинация может быть нетривиальной, и система векторов } \mathbf{u}_1, \mathbf{u}_2, \dots, \mathbf{u}_m \text{ линейно зависима.}
Определения размерности и базиса#
Линейное пространство V называется n-мерным, если в нем существует система из n линейно независимых векторов, а любая система из большего количества векторов линейно зависима. Число n называется размерностью (числом измерений) линейного пространства V и обозначается dim V. Другими словами, размерность пространства — это максимальное число линейно независимых векторов этого пространства. Если такое число существует, то пространство называется конечномерным. Если же для любого натурального числа n в пространстве V найдется система, состоящая из n линейно независимых векторов, то такое пространство называют бесконечномерным (записывают: dim V = ∞). Далее, если не оговорено противное, будут рассматриваться конечномерные пространства.
Базисом n-мерного линейного пространства называется упорядоченная совокупность n линейно независимых векторов (базисных векторов).
Теорема о разложении вектора по базису#
Если e₁, e₂, ..., eₙ — базис n-мерного линейного пространства V, то любой вектор v ∈ V может быть представлен в виде линейной комбинации базисных векторов:
v = v₁ · e₁ + v₂ · e₂ + ... + vₙ · eₙ
и притом единственным образом, т.е. коэффициенты v₁, v₂, ..., vₙ определяются однозначно. Другими словами, любой вектор пространства может быть разложен по базису и притом единственным образом.
Действительно, размерность пространства V равна n. Система векторов e₁, e₂, ..., eₙ линейно независима (это базис). После присоединения к базису любого вектора v, получаем линейно зависимую систему e₁, e₂, ..., eₙ, v (так как это система состоит из (n+1) векторов n-мерного пространства). По свойству 7 линейно зависимых и линейно независимых векторов получаем заключение теоремы.
Следствие 1.
Если e₁, e₂, ..., eₙ — базис пространства V, то V = Lin(e₁, e₂, ..., eₙ), т.е. линейное пространство является линейной оболочкой базисных векторов.
В самом деле, для доказательства равенства V = Lin(e₁, e₂, ..., eₙ) двух множеств достаточно показать, что включения V ⊂ Lin(e₁, e₂, ..., eₙ) и Lin(e₁, e₂, ..., eₙ) ⊂ V выполняются одновременно. Действительно, с одной стороны, любая линейная комбинация векторов линейного пространства принадлежит самому линейному пространству, т.е. Lin(e₁, e₂, ..., eₙ) ⊂ V. С другой стороны, любой вектор пространства по теореме 8.1 можно представить в виде линейной комбинации базисных векторов, т.е. V ⊂ Lin(e₁, e₂, ..., eₙ). Отсюда следует равенство рассматриваемых множеств.
Следствие 2.
Если e₁, e₂, ..., eₙ — линейно независимая система векторов линейного пространства V и любой вектор v ∈ V может быть представлен в виде линейной комбинации (8.4):
v = v₁ · e₁ + v₂ · e₂ + ... + vₙ · eₙ, то пространство V имеет размерность n, а система e₁, e₂, ..., eₙ является его базисом.
В самом деле, в пространстве V имеется система n линейно независимых векторов, а любая система u₁, u₂, ..., uₙ из большего количества векторов (k > n) линейно зависима, поскольку каждый вектор из этой системы линейно выражается через векторы e₁, e₂, ..., eₙ. Значит, dim V = n и e₁, e₂, ..., eₙ — базис V.
Теорема о дополнении системы векторов до базиса#
Теорема о дополнении системы векторов до базиса
Всякую линейно независимую систему **k** векторов **n**-мерного линейного пространства (1 ≤ k < n) можно дополнить до базиса пространства.
В самом деле, пусть e₁, e₂, ..., eₖ — линейно независимая система векторов n-мерного пространства V (1 ≤ k < n). Рассмотрим линейную оболочку этих векторов:
Lₖ = Lin(e₁, e₂, ..., eₖ).
Любой вектор v ∈ Lₖ образует с векторами e₁, e₂, ..., eₖ линейно зависимую систему e₁, e₂, ..., eₖ, v, так как вектор v линейно выражается через остальные. Поскольку в n-мерном пространстве существует n линейно независимых векторов, то Lₖ ≠ V и существует вектор eₖ₊₁ ∈ V, который не принадлежит Lₖ.
Дополняя этим вектором линейно независимую систему e₁, e₂, ..., eₖ, получаем систему векторов e₁, e₂, ..., eₖ, eₖ₊₁, которая также линейно независима. Действительно, если бы она оказалась линейно зависимой, то из пункта 1 замечаний 8.3 следовало, что eₖ₊₁ ∈ Lin(e₁, e₂, ..., eₖ) = Lₖ, а это противоречит условию eₖ₊₁ ∉ Lₖ.
Итак, система векторов e₁, e₂, ..., eₖ, eₖ₊₁ линейно независима. Значит, первоначальную систему векторов удалось дополнить одним вектором без нарушения линейной независимости. Продолжаем аналогично. Рассмотрим линейную оболочку этих векторов:
Lₖ₊₁ = Lin (e₁, e₂, ..., eₖ, eₖ₊₁).
Если Lₖ₊₁ = V, то e₁, e₂, ..., eₖ, eₖ₊₁ — базис и теорема доказана. Если Lₖ₊₁ ≠ V, то дополняем систему e₁, e₂, ..., eₖ, eₖ₊₁ вектором eₖ₊₂ ∉ Lₖ₊₁ и т.д. Процесс дополнения обязательно закончится, так как пространство V конечномерное.
В результате получим равенство V = Lₙ = Lin (e₁, ..., eₖ, ..., eₙ), из которого следует, что e₁, ..., eₖ, ..., eₙ — базис пространства V. Теорема доказана.
Координаты и преобразования координат в линейном пространстве#
Пусть \mathbf{e}_1, \mathbf{e}_2, \dots, \mathbf{e}_n — базис линейного пространства V .
Каждый вектор \mathbf{v} \in V можно разложить по базису (см. теорему о разложении вектора по базису),
то есть представить в виде:
причем коэффициенты v_1, v_2, \dots, v_n в разложении определяются однозначно.
Эти коэффициенты называются координатами вектора \mathbf{v} в базисе \mathbf{e}_1, \mathbf{e}_2, \dots, \mathbf{e}_n
(или относительно базиса \mathbf{e}_1, \mathbf{e}_2, \dots, \mathbf{e}_n ).
Координаты v_1, v_2, \dots, v_n вектора \mathbf{v} образуют упорядоченный набор чисел,
который представляется в виде матрицы-столбца:
и называется координатным столбцом вектора \mathbf{v} (в данном базисе).
Вектор и его координатный столбец обозначаются одной и той же буквой:
полужирной для вектора и светлой для координат.
Если базис (как упорядоченный набор векторов) представить в виде символической матрицы-строки:
то разложение вектора \mathbf{v} по базису (\mathbf{e}) можно записать следующим образом:
Здесь умножение символической матрицы-строки (\mathbf{e})
на числовую матрицу-столбец \mathbf{v} производится по правилам умножения матриц.
При необходимости, если речь идет о разных базисах, у координатного столбца указывается обозначение базиса,
относительно которого получены координаты, например,
— координатный столбец вектора \mathbf{v} в базисе (\mathbf{e}) = (\mathbf{e}_1, \dots, \mathbf{e}_n) .
Из теоремы о разложении вектора по базису следует, что равные векторы имеют равные соответствующие координаты
(в одном и том же базисе), и наоборот, если координаты векторов (в одном и том же базисе) соответственно равны,
то равны и сами векторы.
Преобразование координат вектора при замене базиса#
Пусть заданы два базиса пространства V :
Базис (\mathbf{e}) будем условно называть "старым", а базис (\mathbf{e}') — "новым".
Пусть известны разложения каждого вектора нового базиса по старому базису:
Записывая по столбцам координаты векторов (\mathbf{e}'_1, \mathbf{e}'_2, \dots, \mathbf{e}'_n) в базисе (\mathbf{e}) , составляем матрицу:
Квадратная матрица S , составленная из координатных столбцов векторов нового базиса (\mathbf{e}') в старом базисе (\mathbf{e}) , называется матрицей перехода от старого базиса к новому.
При помощи матрицы перехода формулу можно записать в виде:
или, используя символику:
Умножение символической матрицы-строки \mathbf{e} на матрицу перехода S производится по правилам умножения матриц.
Пусть в базисе (\mathbf{e}) вектор \mathbf{v} имеет координаты v_1, v_2, \dots, v_n ,
а в базисе (\mathbf{e}') — координаты v'_1, v'_2, \dots, v'_n , т.е.
Или, короче:
Подставляя в правую часть последнего равенства выражение для \mathbf{e}' , получаем:
— два разложения вектора \mathbf{v} в одном и том же базисе (\mathbf{e}) .
Коэффициенты этих разложений должны совпадать (по теореме о разложении вектора по базису), так как это координаты одного и того же вектора в одном базисе. Поэтому:
или в матричной форме:
Дання формула устанавливает связь координат вектора в разных базисах: координатный столбец вектора в старом базисе получается в результате умножения матрицы перехода на координатный столбец вектора в новом базисе.
Домашнее задание#
Доказать
1. Теорему "Линейная оболочка векторов X1,…,Xm образует линейное подпространство пространства V."
2. Попрактиковаться в умножени матриц на следующих примерах
