ДЗ Лабораторная работа №6 "Алгоритм A*"#
Критерий оценки:
- Реализовать решение для заданной картинки на python (3 балла)
- Реализовать решение для заданной картинки на C++ (5 баллов)
- Добавить решение для случайно сгенерирированного поля (+2 балл)
- Добавить решение для случайно сгенерированной карты (+3 балла) (карта отличается от поля тем, что каждой клетке присвоен некоторый вес)
В отчете должно быть указано следующие:
1. Титульный лист, где указаны ФИО преподавателя, номер задания, номер варианта
2. Формулировка задания (картинка)
3. Ссылка на github-репозиторий с работающим кодом
4. Блок-схема алгоритма А*
5. Листинг 1. Откоментированный код метода А_star.
6. Пример расчета алгоритма А* для вашего варианта (манхэтонское расстоянеи)
7. Рисунки демонстраторы работы проекта с комментариями где была точка старта. Для карт добавить легенду.
8. Листинг 2. Откомментированный полный код вашего проекта.
Описание Алгоритма А*#
A* — это алгоритм поиска пути, находящий кратчайший путь от начальной вершины до целевой в графе, используя эвристическую функцию для оценки стоимости.
Обозначения
- g(n) — стоимость пути от начальной вершины до вершины n.
- h(n) — эвристическая оценка оставшегося расстояния от n до цели.
- f(n) = g(n) + h(n) — полная оценка стоимости пути через n.
Псевдокод
1. Добавить начальную вершину в открытый список (open list).
2. Пока открытый список не пуст:
- Извлечь вершину `n` с наименьшим `f(n)`.
- Если `n` — целевая вершина, путь найден.
- Переместить `n` в закрытый список (closed list).
- Для каждой соседней вершины `m`:
- Если `m` в закрытом списке, пропустить.
- Вычислить `g(m)`, `h(m)`, `f(m)`.
- Если `m` нет в открытом списке или найден более короткий путь к `m`, сохранить путь и добавить `m` в открытый список.
Пример#
Пусть есть следующая сетка (S — старт, G — цель, # — стена):
S . . .
# # . #
. . . G
Координаты:
- S = (0, 0)
- G = (2, 3)
Допущения:
- Стоимость перехода на соседнюю клетку (вверх, вниз, влево, вправо) = 1
- Эвристика h(n) = манхэттенское расстояние
| Шаг | Текущая | Open list | Closed list | Примечание |
|---|---|---|---|---|
| 1 | (0,0) | [(0,1), (1,0)] | [(0,0)] | h(0,0)=5 |
| 2 | (0,1) | [(1,0), (0,2)] | [(0,0),(0,1)] | f=1+4=5 |
| 3 | (0,2) | [(1,2)] | [(0,0),(0,1),(0,2)] | f=2+3=5 |
| 4 | (1,2) | [(2,2)] | ... | f=3+2=5 |
| 5 | (2,2) | [(2,3)] | ... | f=4+1=5 |
| 6 | (2,3) | [] | ... | f=5+0=5, цель достигнута |
Итоговый путь (0,0) → (0,1) → (0,2) → (1,2) → (2,2) → (2,3)
Подсказки по написанию и работе кода#
Создание и работа с ячейками (Cell)#
- Каждый объект
Cellпредставляет отдельную ячейку на сетке. - Метод
update_neighborsобновляет список соседей, в которые можно перейти (не препятствия). - Методы
make_start(),make_end(),make_barrier()и др. задают тип и цвет ячейки.
Работа с сеткой#
- Сетка создаётся функцией
make_grid(), которая возвращает список списков объектовCell. - Функция
draw_grid(win, grid)отрисовывает ячейки и линии сетки.
Алгоритм A*#
- Реализован в функции
a_star_algorithm. - Используется манхэттенское расстояние:
abs(x1 - x2) + abs(y1 - y2). - Каждая ячейка содержит:
g— расстояние от старта;h— оценка до цели;f=g + h.
Поиск пути#
PriorityQueueиспользуется для выбора ячейки с минимальнымf.open_set_hash— вспомогательное множество для ускоренной проверки наличия в очереди.reconstruct_pathвосстанавливает путь по словарюcame_from.
Обработка событий и клавиш#
- Нажмите
SPACE, чтобы запустить алгоритм A*. - Нажмите
R, чтобы сгенерировать новое случайное поле. - Окно закрывается при событии
QUIT.
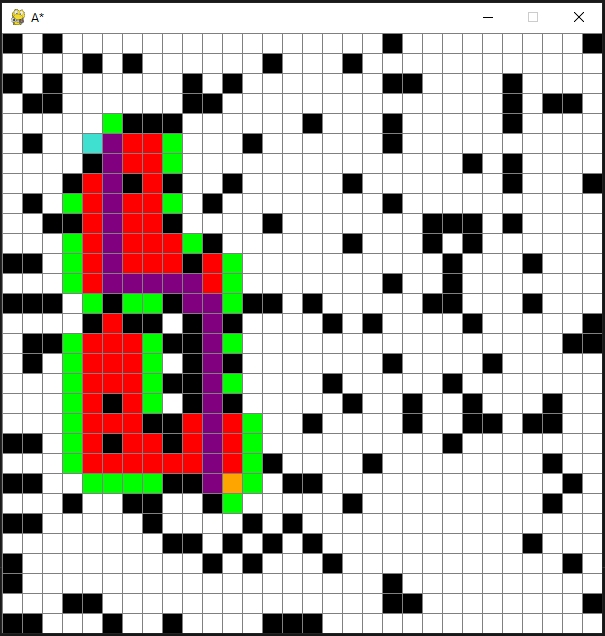
Цвета в визуализации#
| Цвет | Значение |
|---|---|
| Белый | Пустая ячейка |
| Чёрный | Препятствие |
| Оранжевый | Начало |
| Бирюзовый | Конец |
| Зелёный | В очереди |
| Красный | Посещена |
| Фиолетовый | Путь |
Некоторые фрагменты кода с комментариями#
import pygame
import random
import math
from queue import PriorityQueue
# Инициализация Pygame
pygame.init()
# Константы
WIDTH = 600
GRID_SIZE = 30 # Размер поля NxN
CELL_SIZE = WIDTH // GRID_SIZE
WIN = pygame.display.set_mode((WIDTH, WIDTH))
pygame.display.set_caption("A*")
# Цвета
RED = (255, 0, 0)
GREEN = (0, 255, 0)
BLUE = (0, 0, 255)
YELLOW = (255, 255, 0)
WHITE = (255, 255, 255)
BLACK = (0, 0, 0)
PURPLE = (128, 0, 128)
ORANGE = (255, 165, 0)
GREY = (128, 128, 128)
TURQUOISE = (64, 224, 208)
# Типы ячеек
EMPTY = 0
OBSTACLE = 1
START = 2
END = 3
PATH = 4
VISITED = 5
def make_grid():
grid = []
for i in range(GRID_SIZE):
grid.append([])
for j in range(GRID_SIZE):
cell = Cell(i, j)
grid[i].append(cell)
return grid
def draw_grid(win, grid):
for row in grid:
for cell in row:
cell.draw(win)
# Рисуем сетку
for i in range(GRID_SIZE):
pygame.draw.line(win, GREY, (0, i * CELL_SIZE), (WIDTH, i * CELL_SIZE))
pygame.draw.line(win, GREY, (i * CELL_SIZE, 0), (i * CELL_SIZE, WIDTH))
pygame.display.update()
def generate_random_grid(grid):
# Очищаем сетку
for row in grid:
for cell in row:
cell.reset()
# Выбираем случайные начальную и конечную точки
start_row, start_col = random.randint(0, GRID_SIZE-1), random.randint(0, GRID_SIZE-1)
end_row, end_col = random.randint(0, GRID_SIZE-1), random.randint(0, GRID_SIZE-1)
# Убедимся, что начальная и конечная точки разные
while (start_row, start_col) == (end_row, end_col):
end_row, end_col = random.randint(0, GRID_SIZE-1), random.randint(0, GRID_SIZE-1)
start = grid[start_row][start_col]
end = grid[end_row][end_col]
start.make_start()
end.make_end()
# Добавляем случайные препятствия (20% ячеек)
obstacle_count = int(GRID_SIZE * GRID_SIZE * 0.2)
for _ in range(obstacle_count):
row, col = random.randint(0, GRID_SIZE-1), random.randint(0, GRID_SIZE-1)
cell = grid[row][col]
if not cell.is_start() and not cell.is_end():
cell.make_barrier()
return start, end
#include <SFML/Graphics.hpp>
#include <iostream>
#include <vector>
#include <queue>
#include <cmath>
#include <algorithm>
#include <random>
using namespace std;
using namespace sf;
const int GRID_SIZE = 30; // Размер поля NxN
const int CELL_SIZE = 25; // Размер одной ячейки в пикселях
const int WINDOW_SIZE = GRID_SIZE * CELL_SIZE;
// Типы ячеек
enum CellType {
EMPTY,
OBSTACLE,
START,
END,
PATH,
VISITED
};
// Структура для представления ячейки
struct Cell {
int x, y;
CellType type;
int f, g, h; // Для алгоритма A*
Cell* parent;
Cell(int x, int y) : x(x), y(y), type(EMPTY), f(0), g(0), h(0), parent(nullptr) {}
// Перезагрузка оператора == для сравнения ячеек
bool operator==(const Cell& other) const {
return x == other.x && y == other.y;
}
};
// Функция для вычисления эвристики (манхэттенское расстояние)
int heuristic(const Cell& a, const Cell& b) {
return //ваш код здесь
}
// Функция для проверки, находится ли ячейка в пределах сетки
bool isValid(int x, int y) {
return //ваш код здесь
}
Также подсказка как отрисовать
for (int i = 0; i < GRID_SIZE; ++i) {
for (int j = 0; j < GRID_SIZE; ++j) {
RectangleShape cell(Vector2f(CELL_SIZE - 1, CELL_SIZE - 1));
cell.setPosition(i * CELL_SIZE, j * CELL_SIZE);
switch (grid[i][j].type) {
case EMPTY: cell.setFillColor(Color::White); break;
case OBSTACLE: cell.setFillColor(Color::Black); break;
case START: cell.setFillColor(Color::Green); break;
case END: cell.setFillColor(Color::Red); break;
case PATH: cell.setFillColor(Color::Blue); break;
case VISITED: cell.setFillColor(Color::Cyan); break;
}
window.draw(cell);
}
}
Примеры интерфейса на Python, C++#
SFML (C++)
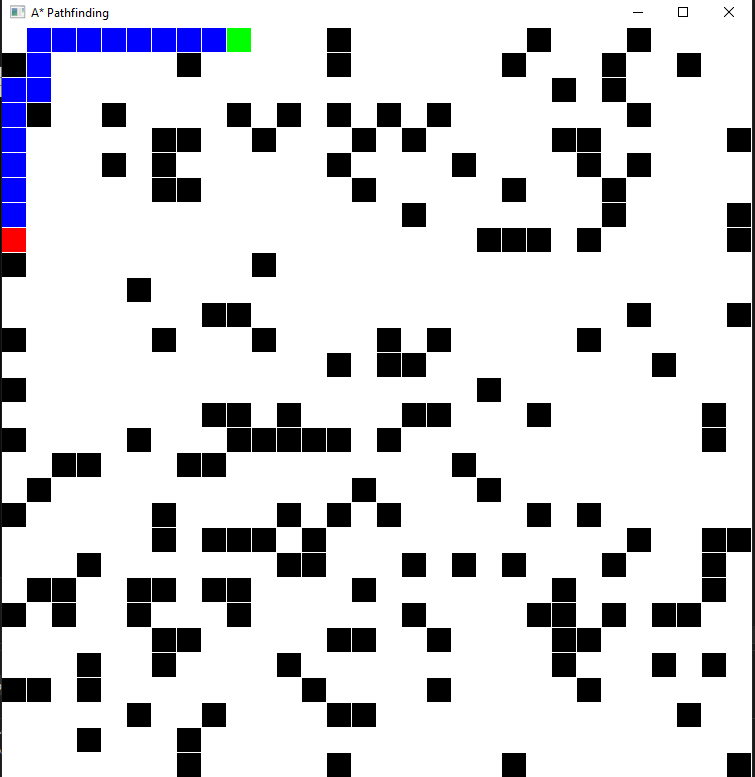
Pygame (Python)
Варианты#
| № варианта | Лабиринт |
|---|---|
| 1 | 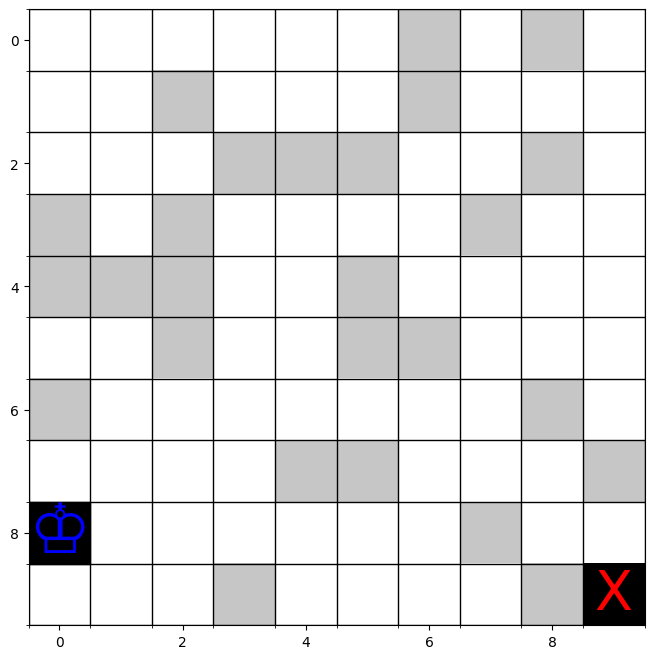 |
| 2 | 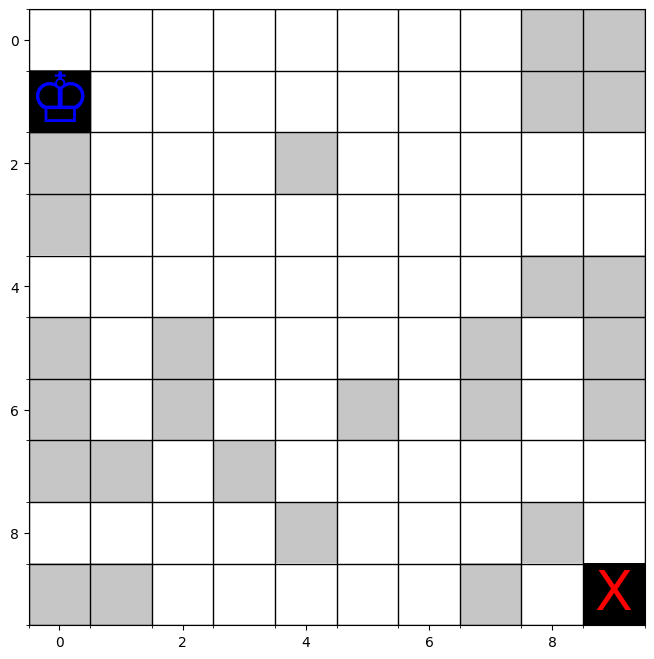 |
| 3 | 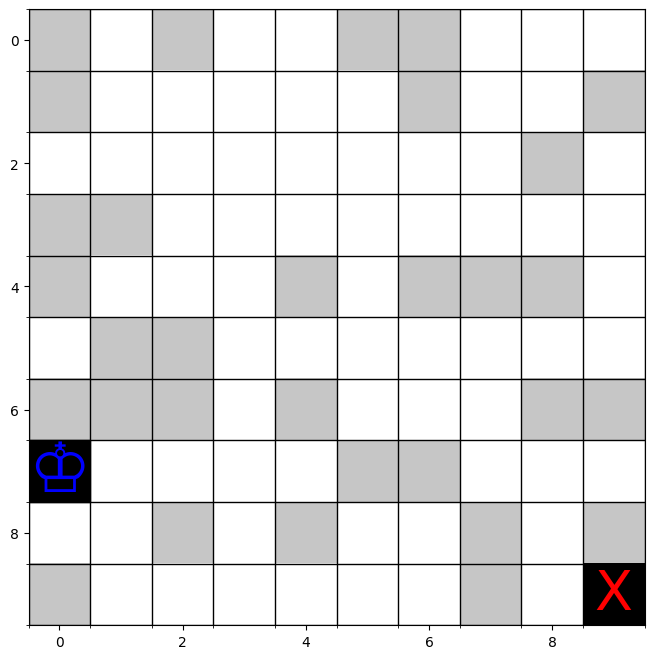 |
| 4 | 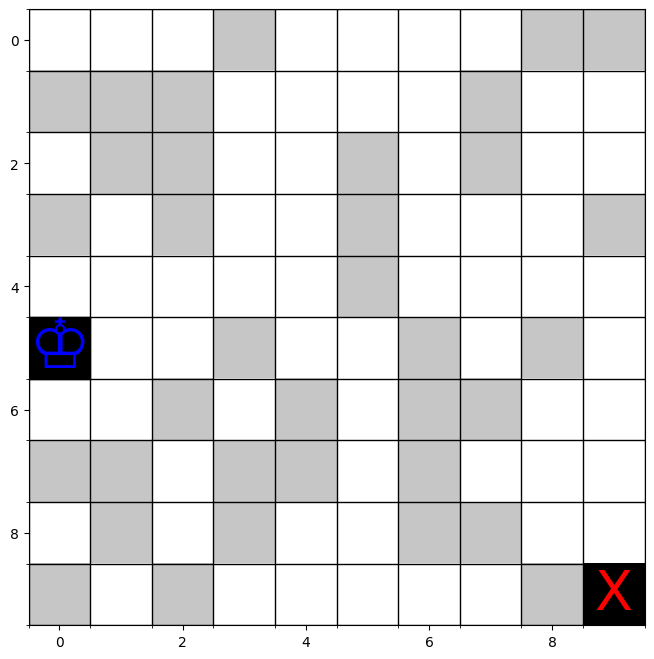 |
| 5 | 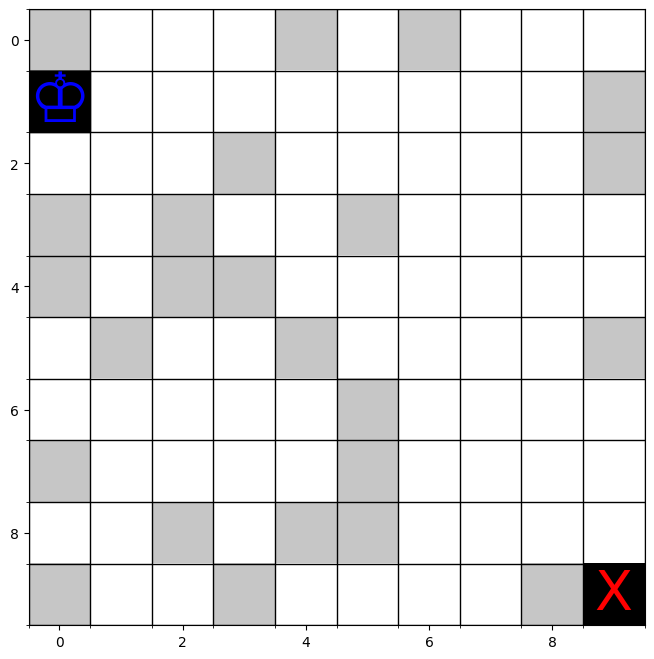 |
| 6 | 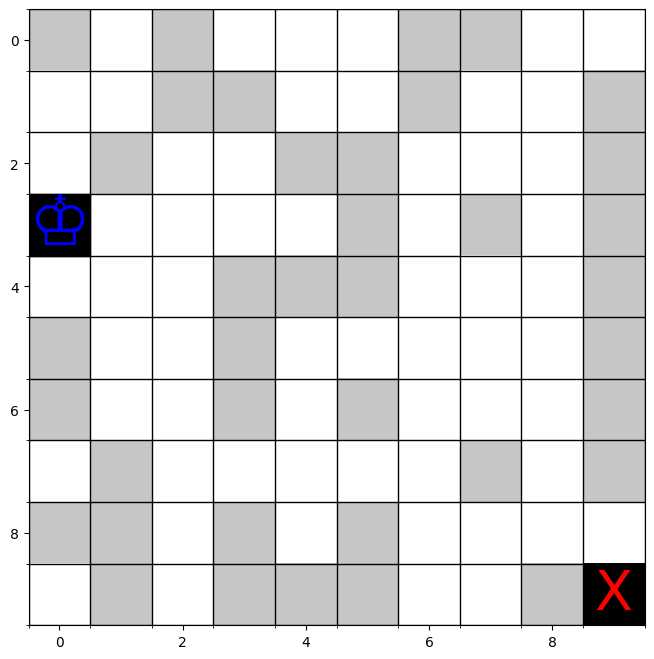 |
| 7 | 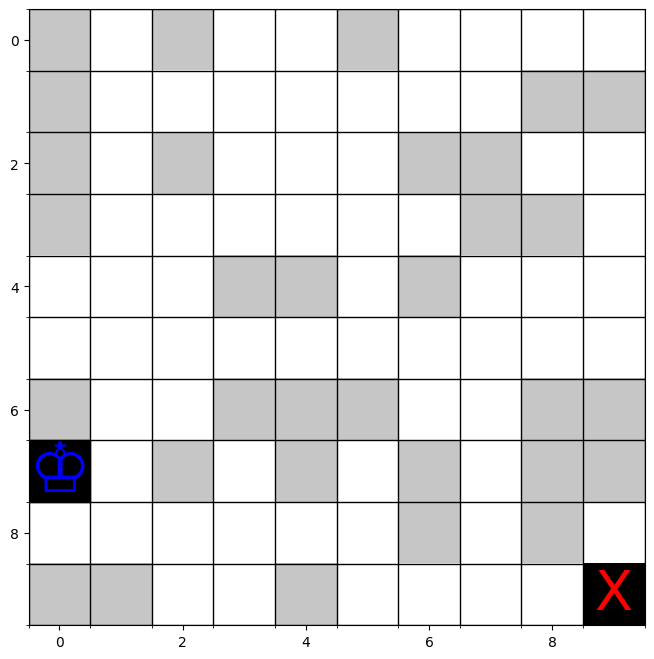 |
| 8 | 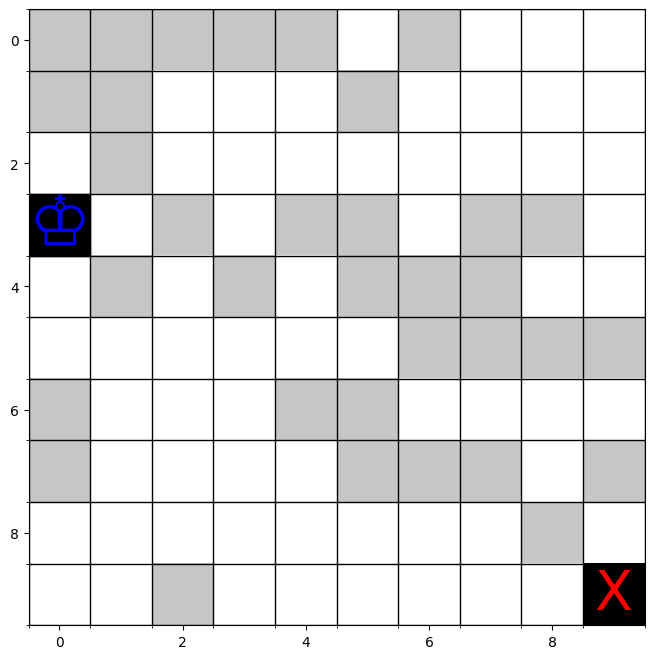 |
| 9 | 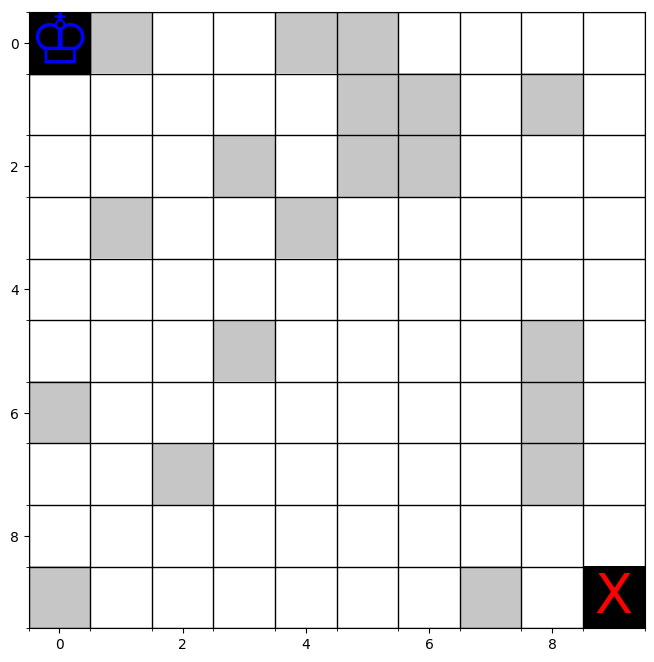 |
| 10 | 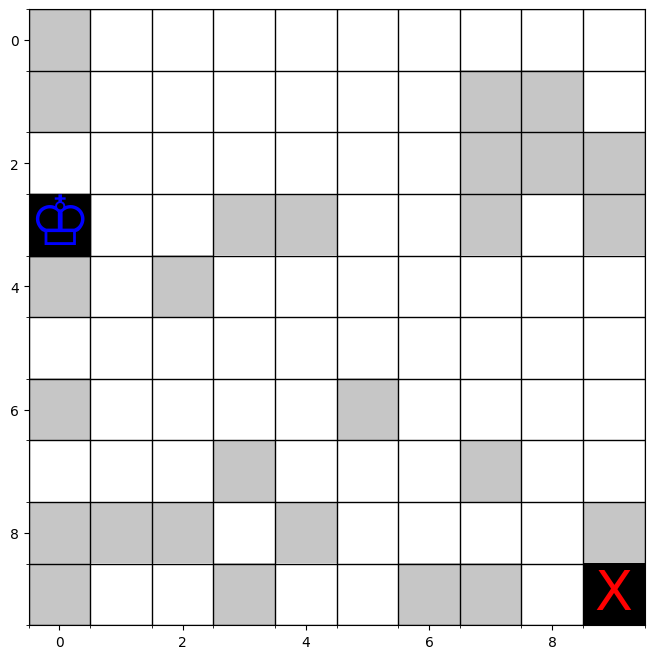 |
| 11 | 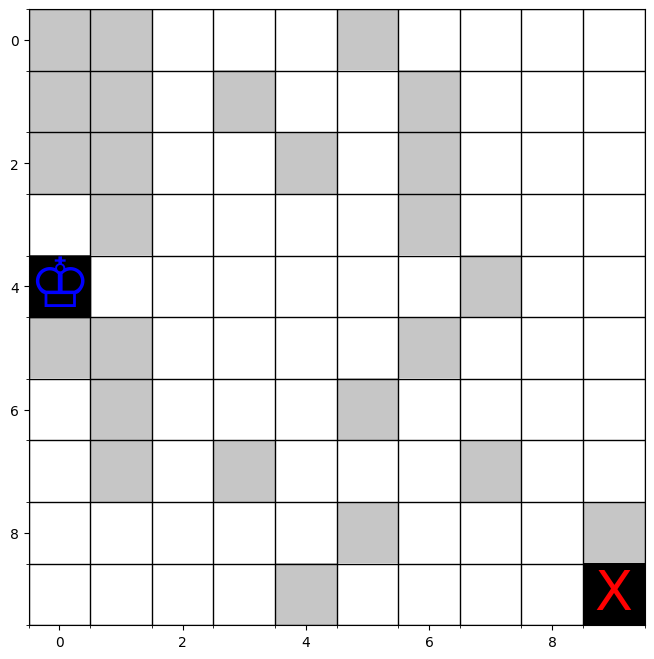 |
| 12 | 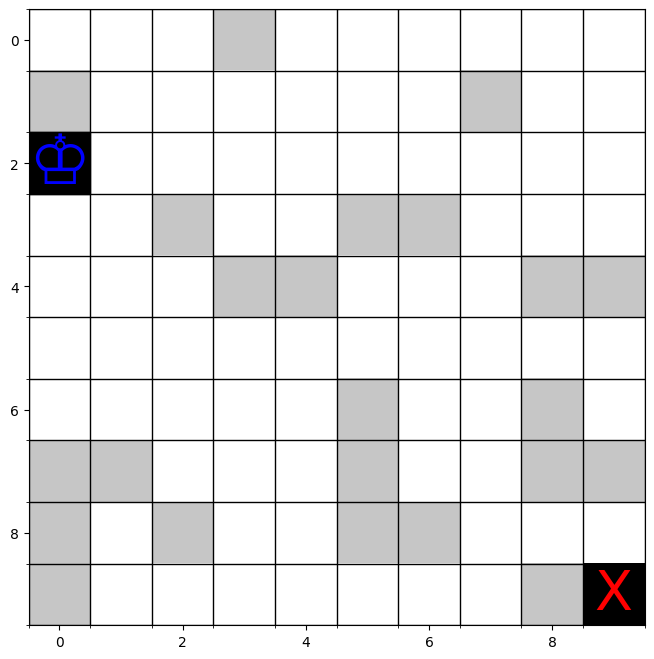 |
| 13 | 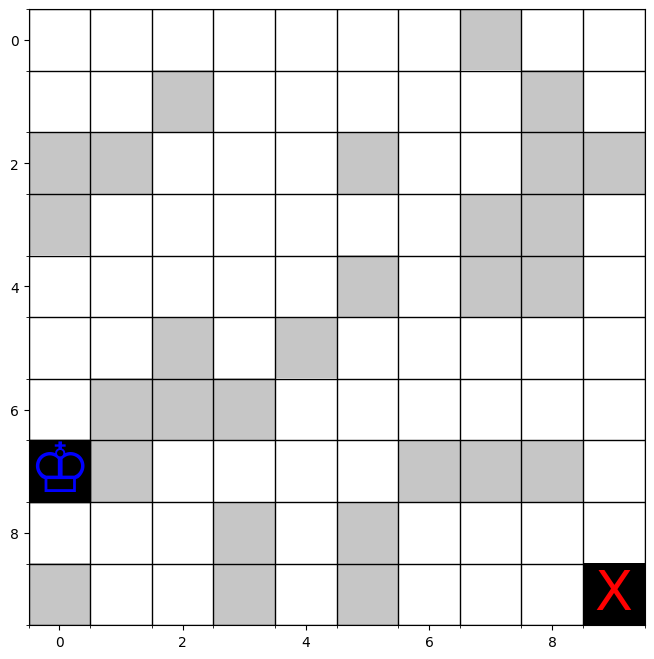 |
| 14 | 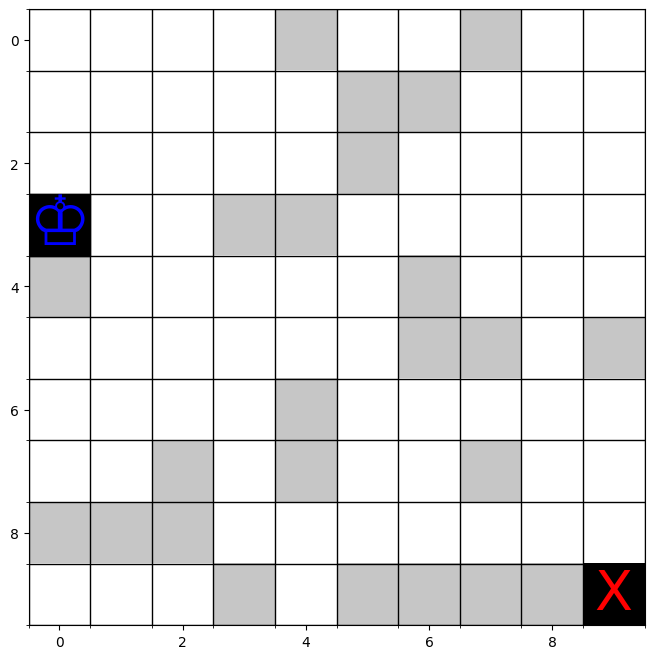 |
| 15 | 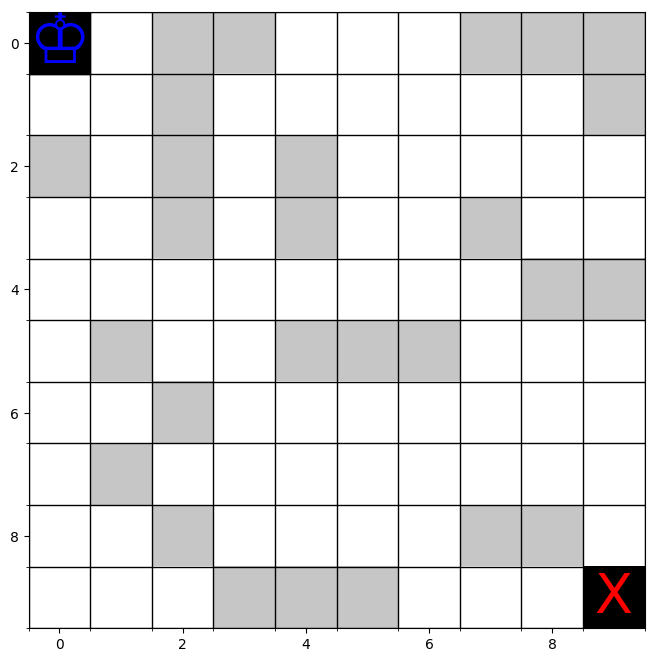 |
| 16 | 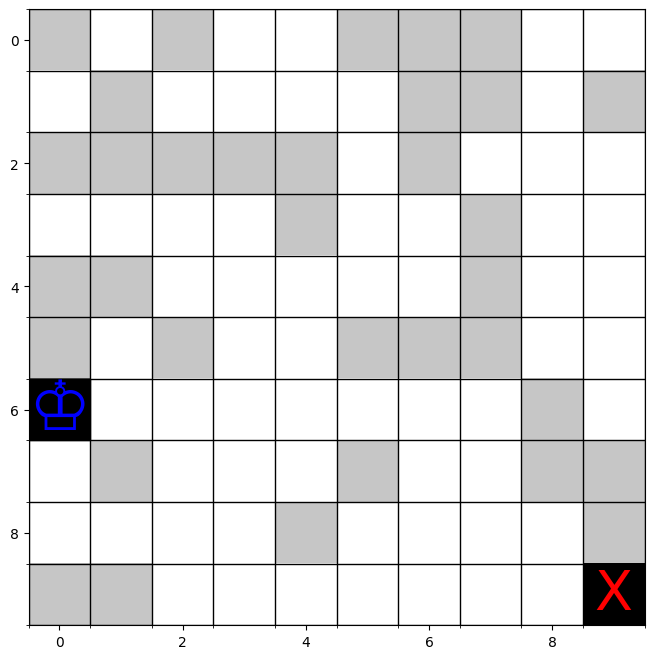 |
| 17 | 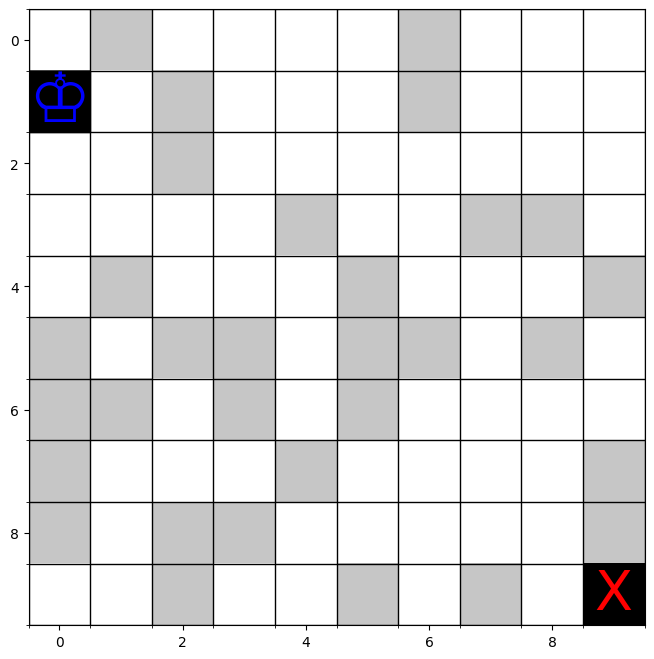 |
| 18 | 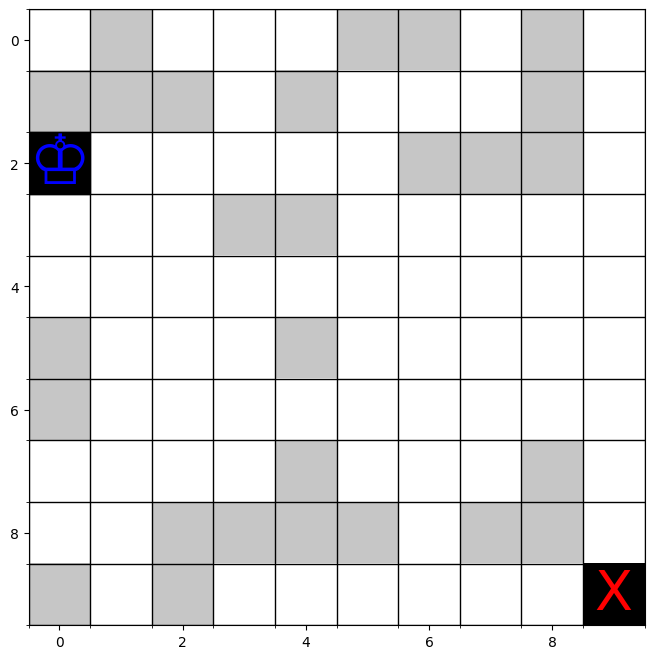 |
| 19 | 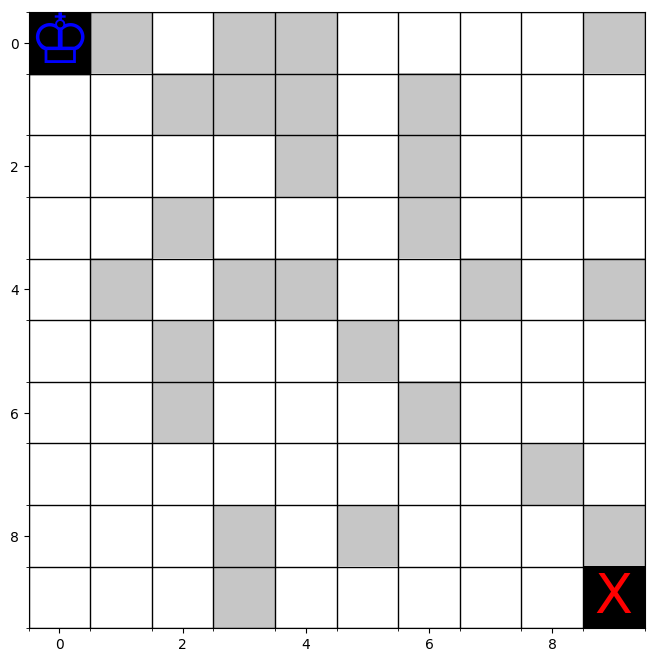 |
| 20 | 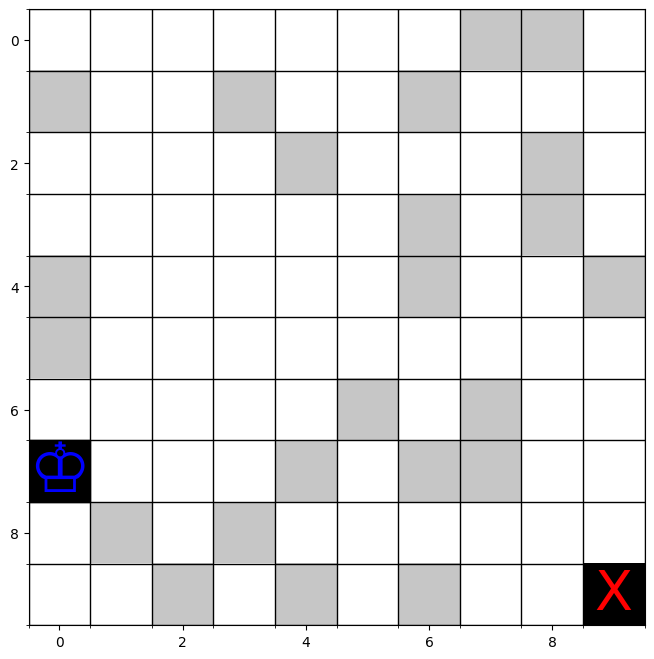 |
| 21 | 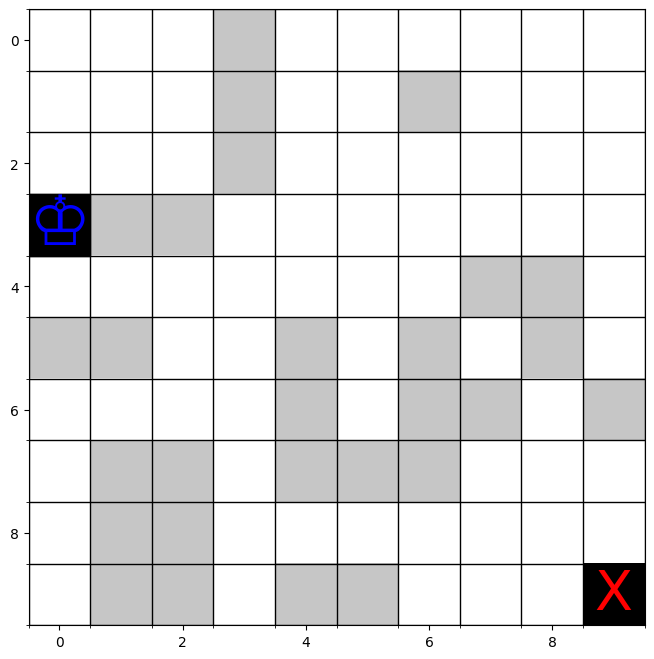 |
| 22 | 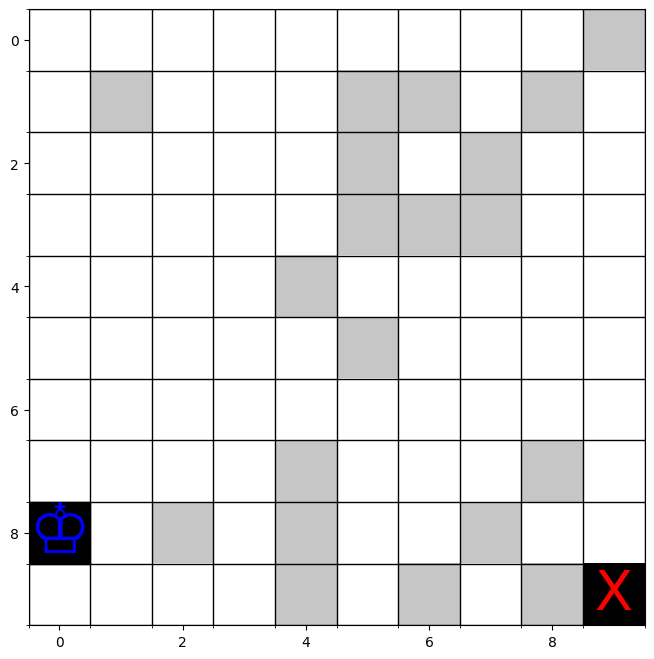 |
| 23 | 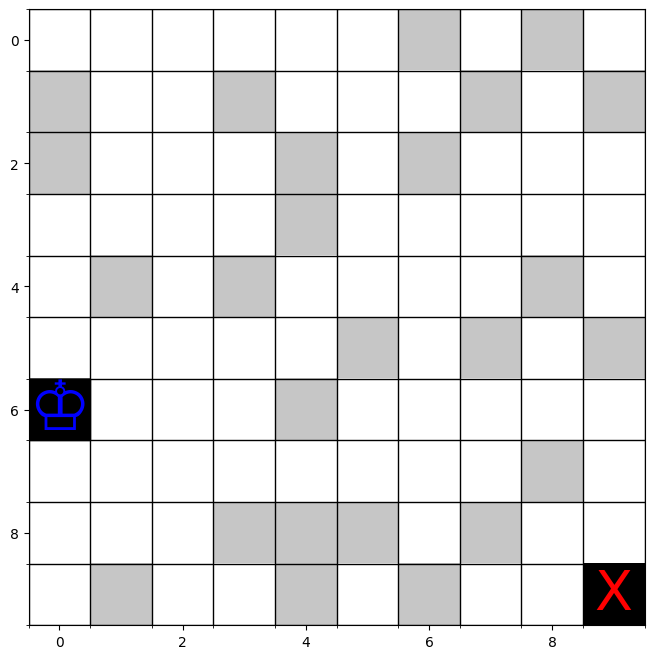 |
| 24 | 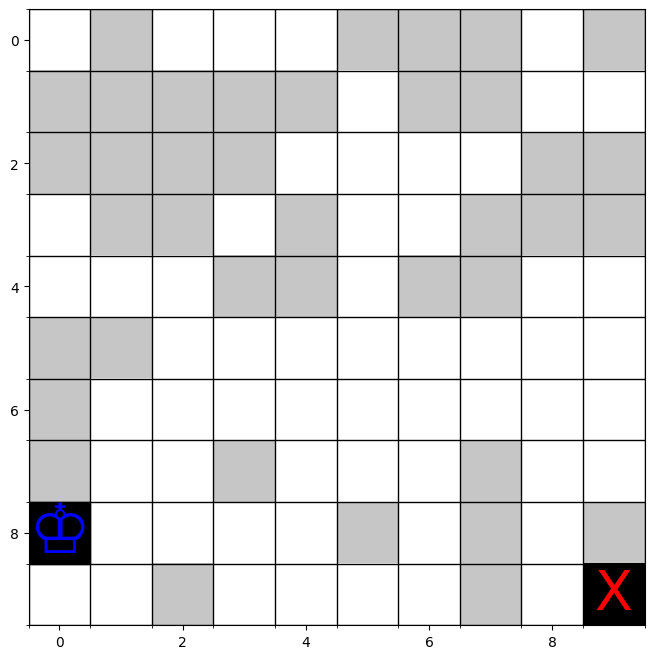 |
| 25 | 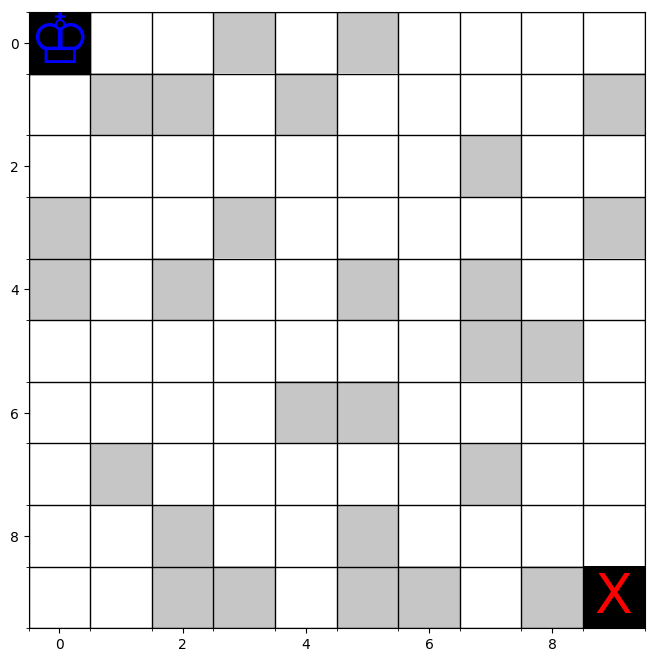 |
| 26 | 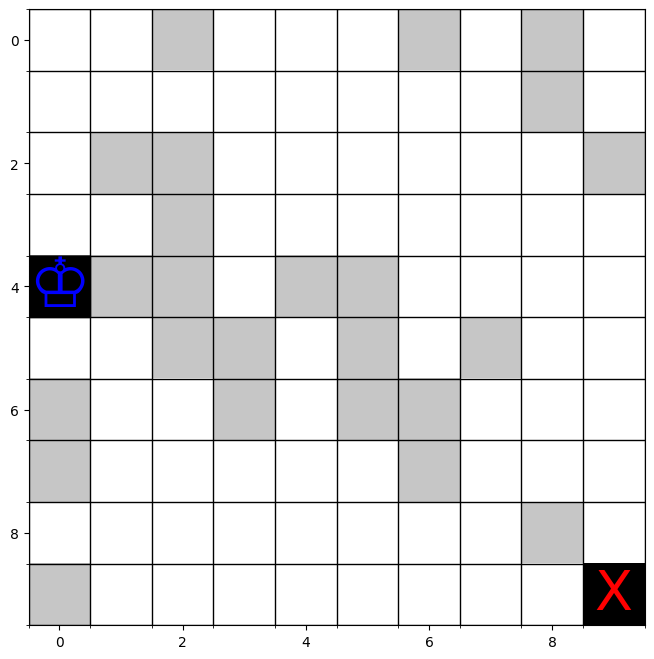 |
| 27 | 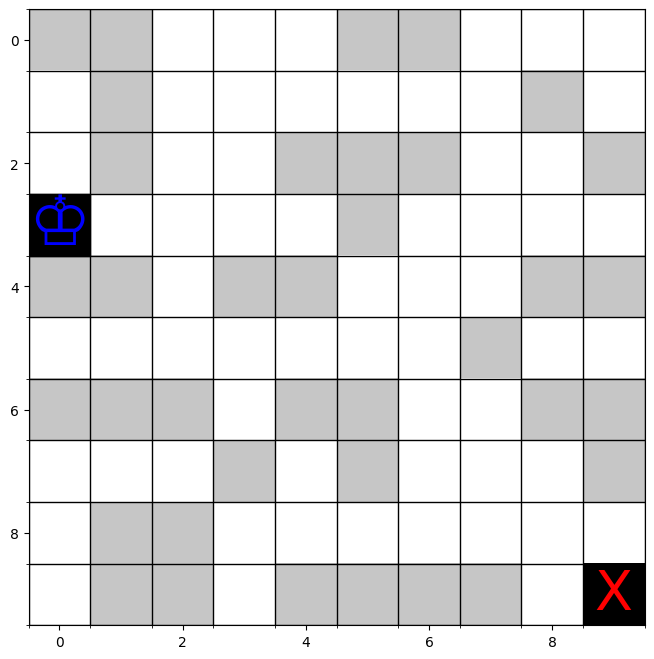 |
| 28 | 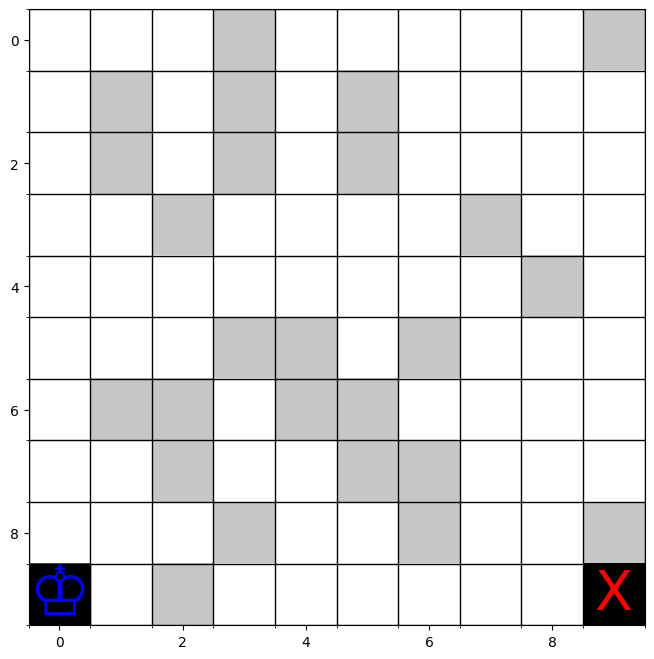 |
| 29 | 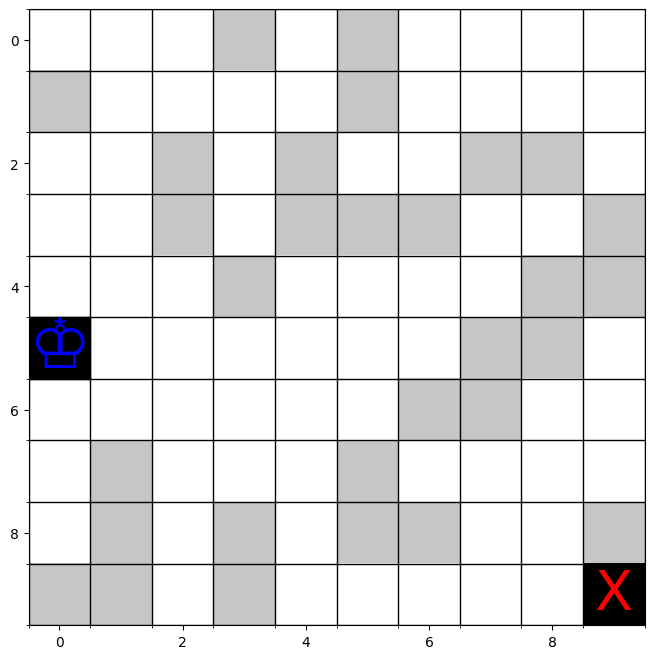 |
| 30 | 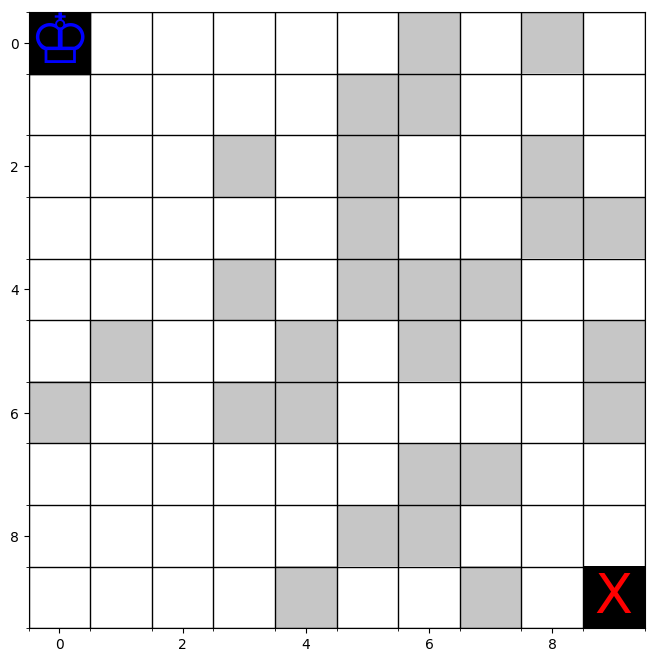 |