Задача Коммивояжера подходы и решения#
Исторический экскурс#
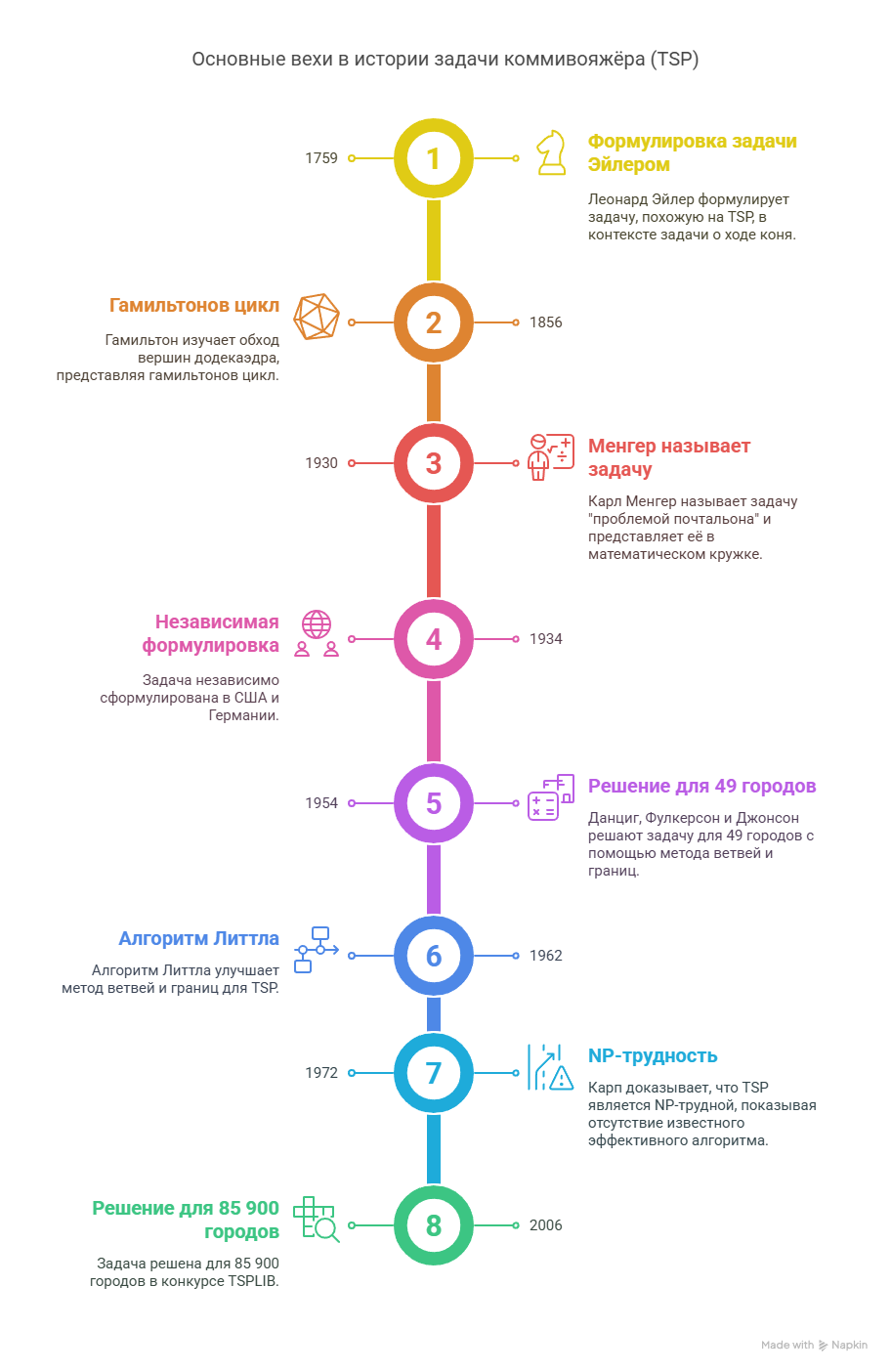
Первые идеи, схожие с задачей коммивояжёра, можно обнаружить ещё в XIX веке. В 1832 году ирландский математик Уильям Гамильтон обсуждал пути, проходящие через определённые вершины графа, что позже вылилось в изучение гамильтоновых циклов. Однако формулировка задачи о нахождении кратчайшего маршрута для обхода всех точек появилась только в XX веке.
Важный этап в развитии задачи коммивояжёра наступил в 1950–1960 гг., когда её исследованием занялись американские и европейские ученые. Здесь особенно выделяются Джордж Данциг, Делберт Рей Фалкерсон и Селмер Джонсон, работавшие в институте RAND Corporation. В 1954 году они сформулировали задачу как задачу дискретной оптимизации и применили метод отсечений (алгоритм Гомори) для решения варианта задачи коммивояжёра с 49 городами, обосновав оптимальность найденного маршрута.
В это же время появились родственные постановки. В 1962 году китайский математик Мэй-Ку Куан сформулировал так называемую задачу китайского почтальона, в которой требовалось пройти по каждой улице города хотя бы один раз минимальным путём. Это задание отличалось от классической задачи коммивояжёра, но обострило интерес к оптимизационным задачам на графах.
В 1960–1970 гг. исследование задачи коммивояжёра шло в двух направлениях: теоретическом (развитие алгоритмов, доказательство вычислительной сложности) и прикладном (оптимизация маршрутов в экономике, биологии, химии, информатике). Важнейшим теоретическим событием стало доказательство NP-полноты задачи поиска гамильтонова пути американским информатиком Ричардом Мэннингом Карпом в 1972 году, что автоматически устанавливало NP-трудность задачи коммивояжёра.
Особенно плодотворными были 1970–1980-е годы. Мартин Гретчел, Манфред Падберг, Джованни Ринальди и другие ученые добились крупных успехов в решении задачи на практике, применяя новые методы — такие как деление плоскостью и метод ветвей и границ. В результате им удалось найти оптимальное решение задачи коммивояжёра для 2392 городов.
Развитие вычислительной техники и алгоритмов позволило достигать всё больших рекордов. В апреле 2006 года было установлено решение задачи коммивояжёра для случая с 85 900 городами. Однако это далеко не предел: современные эвристические и точные методы позволяют эффективно работать с задачами, содержащими миллионы вершин.
Сегодня задача коммивояжёра остаётся не только классическим примером комбинаторной оптимизации, но и тестовой площадкой для новых вычислительных методов. Её приложения охватывают логистику, робототехнику, планирование маршрутов дронов, оптимизацию сборки цепочек в биоинформатике и многое другое.
Формальная постановка задачи#
Задача коммивояжера (TSP) заключается в нахождении оптимального пути, который проходит через все города, посещая каждый город один раз и возвращается в исходную точку. Пусть дан граф G = (V, E) , где:
- V = \{v_1, v_2, \dots, v_n\} — множество городов,
- E = \{e_{ij}\} — множество рёбер, где e_{ij} — расстояние между городами v_i и v_j .
Задача сводится к нахождению минимального пути C , который соединяет все города, то есть находит такой цикл, который минимизирует суммарное расстояние:
Задача может быть математически выражена как минимизация функции стоимости пути f(x) , где x — последовательность городов:
где d(x_i, x_{i+1}) — расстояние между городами x_i и x_{i+1} .
Цель задачи:
где x — это перестановка всех городов.
Задача коммивояжера является NP-трудной задачей, то есть её решение требует экспоненциального времени для поиска оптимального пути при увеличении количества городов.
Методы решения#
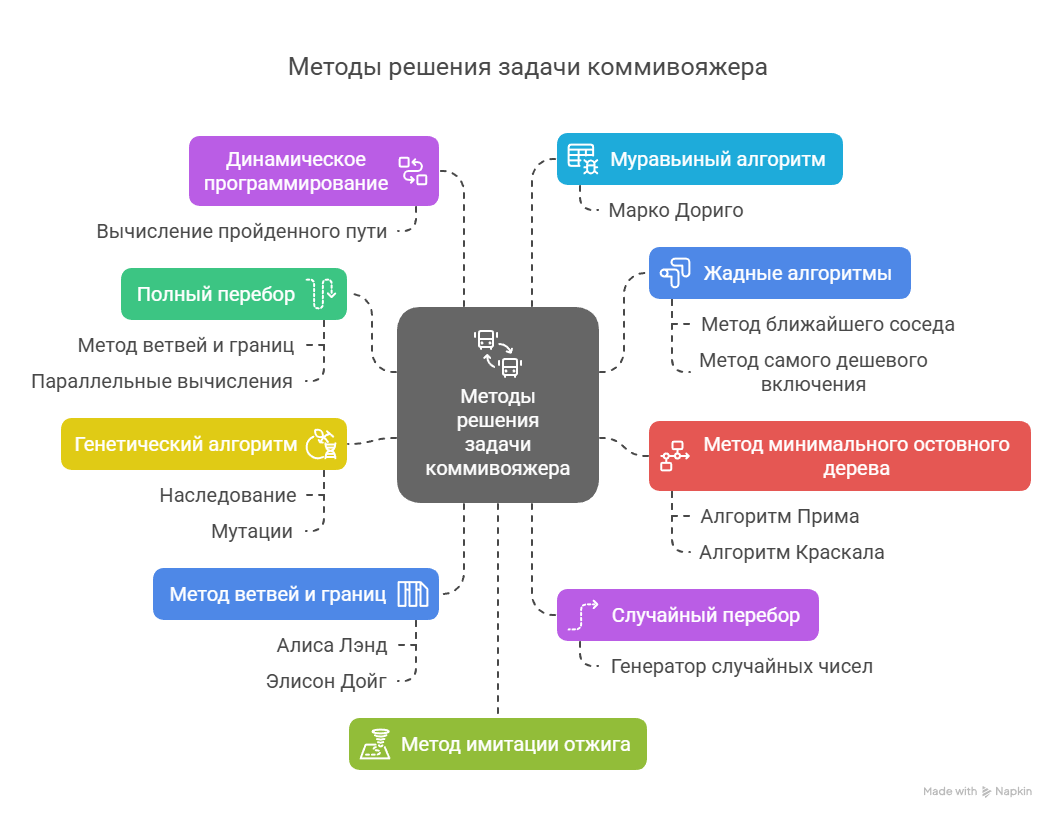
Методы решения задачи коммивояжера довольно разнообразны и различаются применяемым инструментарием, точностью находимого решения и сложностью требуемых вычислений. Вот лишь некоторые из них:
-
Полный перебор (метод «грубой силы», англ. «Brute Force») — заключается в последовательном рассмотрении всех возможных маршрутов и выборе из них оптимального. Метод самый простой и точный, но неэффективный и при большом количестве городов его применение становится затруднительным ввиду значительных затрат времени и ресурсов на перебор огромного количества вариантов решения задачи. Для ускорения и повышения эффективности полного перебора используются различные приемы: метод ветвей и границ, параллельные вычисления, радужные таблицы.
-
Случайный перебор — в этом случае вычисляются не все возможные варианты маршрута, а лишь некоторые выбранные в случайном порядке (например, с помощью генератора случайных чисел). Из рассмотренных вариантов затем выбирается наилучший. Конечно, вероятнее всего полученное решение не будет оптимальным (впрочем, оно не будет и самым худшим), но зато данный метод требует меньших затрат времени и вычислительных ресурсов, а потому в некоторых случаях его применение оправдано.
-
Динамическое программирование — ключевая идея заключается в вычислении и запоминании пройденного пути от исходного города до всех остальных, последующем прибавлении к нему расстояний от текущих городов до оставшихся, и так далее. По сравнению с полным перебором этот метод позволяет существенно сократить объем вычислений.
-
Жадные алгоритмы (англ. «Greedy») — основаны на нахождении локально оптимальных решений на каждом этапе вычислений и допущении, что найденное таким образом итоговое решение будет глобально оптимальным. Т. е. на каждой итерации выбирается лучший участок пути, который включается в итоговый маршрут. Метод простой, но его большой недостаток в том, что может возникнуть ситуация, когда окажется, что начальная и конечная точки маршрута разнесены далеко друг от друга и их придется соединять длинным отрезком пути, что значительно снизит эффективность решения. К жадным алгоритмам относятся: метод ближайшего соседа (англ. «Nearest Neighbour»), модифицированный метод ближайшего соседа (англ. «Double Ended Nearest Neighbour»), метод самого дешевого включения и т. д.
-
Метод минимального остовного дерева — поиск маршрута ведется на графе. Для нахождения оптимального пути применяются различные инструменты: алгоритм Прима, алгоритм Краскала, алгоритм Борувки.
-
Метод имитации отжига — один из численных методов Монте-Карло.
-
Метод эластичной сети — каждый из возможных маршрутов рассматривается как отображение окружности на плоскость.
-
Муравьиный алгоритм — эвристический метод, основанный на моделировании поведения муравьев, ищущих пути от своей колонии к источникам пищи. Первую версию такого алгоритма предложил доктор наук Марко Дориго в 1992 году. Этот метод позволяет относительно быстро найти хорошее, но не обязательно оптимальное решение.
-
Генетический алгоритм — еще один эвристический метод, заключающийся в случайном подборе и комбинировании исходных параметров с использованием механизмов имитирующих естественный отбор в процессе эволюции (наследование, мутации, кроссинговер). Несмотря на довольно широкие возможности применения (и не только в логистике), этот метод часто становится объектом критики.
-
Метод ветвей и границ — один из методов дискретной оптимизации, являющийся развитием метода полного перебора, но отличающийся от него отсевом в процессе вычисления подмножеств неэффективных решений. Впервые был предложен в 1960 году английским профессором Алисой Лэнд и австралийским математиком Элисон Дойг.
Полный перебор#
from itertools import permutations
def calculate_distance(route, distance_matrix):
return sum(distance_matrix[route[i]][route[i+1]] for i in range(len(route)-1)) + distance_matrix[route[-1]][route[0]]
def brute_force_tsp(distance_matrix):
n = len(distance_matrix)
cities = list(range(n))
min_distance = float('inf')
best_route = None
for perm in permutations(cities):
current_distance = calculate_distance(perm, distance_matrix)
if current_distance < min_distance:
min_distance = current_distance
best_route = perm
return best_route, min_distance
# Пример использования
distance_matrix = [
[0, 10, 15, 20],
[10, 0, 35, 25],
[15, 35, 0, 30],
[20, 25, 30, 0]
]
route, distance = brute_force_tsp(distance_matrix)
print("Лучший маршрут:", route)
print("Кратчайшее расстояние:", distance)
Разбор кода:
- Используется itertools.permutations для генерации всех возможных маршрутов.
- Функция calculate_distance() вычисляет длину маршрута, включая возвращение в начальный город.
- Перебираются все возможные перестановки городов, выбирается маршрут с минимальным расстоянием.
Сложность:
Полный перебор имеет факториальную сложность O(n!), так как рассматриваются все возможные маршруты.
Это делает алгоритм непрактичным для больших n, например, уже при n=10 количество возможных маршрутов достигает 3,628,800.
✅ Достоинства решения:
- Гарантированно находит оптимальное решение.
- Простая реализация.
❌ Недостатки решения:
- Экспоненциальная сложность — не подходит для больших входных данных.
- Требует хранения всех возможных маршрутов, что потребляет много памяти.
Жадные алгоритмы#
Простые эвристики, такие как «ближайший сосед» (Nearest Neighbor), позволяют быстро находить приближённые решения, но не гарантируют их оптимальность.
def nearest_neighbor_tsp(distance_matrix):
n = len(distance_matrix)
visited = [False] * n
route = [0] # Начинаем с первого города
visited[0] = True
for _ in range(n - 1):
last_city = route[-1]
nearest_city = min(
[(i, distance_matrix[last_city][i]) for i in range(n) if not visited[i]],
key=lambda x: x[1]
)[0]
route.append(nearest_city)
visited[nearest_city] = True
route.append(0) # Возвращаемся в начальный город
total_distance = sum(distance_matrix[route[i]][route[i+1]] for i in range(n))
return route, total_distance
# Пример использования
route, distance = nearest_neighbor_tsp(distance_matrix)
print("Жадный маршрут:", route)
print("Приближённое расстояние:", distance)
Разбор кода
Функция nearest_neighbor_tsp(distance_matrix)
Инициализация:
visited = [False] * n – массив отслеживает, какие города уже посещены.
route = [0] – начинаем маршрут с первого города.
visited[0] = True – помечаем его как посещённый.
Основной цикл (for _ in range(n - 1)):
Находим ближайший непосещённый город:
nearest_city = min(
[(i, distance_matrix[last_city][i]) for i in range(n) if not visited[i]],
key=lambda x: x[1]
)[0]
Добавляем его в маршрут и помечаем как посещённый.
Завершение маршрута:
- Возвращаемся в стартовый город
route.append(0). - Вычисляем общее расстояние маршрута.
Возвращает:
route – полученный маршрут.
total_distance – длина маршрута.
Временная сложность: O(n^2), так как:
Каждую итерацию находим ближайший город (O(n))
Делаем n-1 итераций → O(n^2).
✅ Достоинства решения:
- Быстрый алгоритм – работает за O(n^2), что намного лучше полного перебора O(n!) и ДП O(n^2 * 2^n).
- Простая реализация.
- Подходит для больших n (до 1000+).
❌ Недостатки решения:
- Не гарантирует оптимальный маршрут.
- Эффект жадности: может привести к "локальному минимуму", когда хороший выбор на ранних этапах приводит к плохому конечному решению.
- Зависит от стартового города: разные стартовые точки могут давать разные маршруты.
Методы ветвей и границ (Branch and Bound)#
Простой, но неэффективный метод — перебрать все возможные маршруты и выбрать оптимальный. Однако этот метод становится непрактичным при увеличении числа городов.
import heapq
def branch_and_bound_tsp(distance_matrix):
n = len(distance_matrix)
min_distance = float('inf')
best_route = None
def tsp(node, visited, cost, path):
nonlocal min_distance, best_route
if len(path) == n:
cost += distance_matrix[node][0]
if cost < min_distance:
min_distance = cost
best_route = path + [0]
return
for next_node in range(n):
if next_node not in visited:
tsp(next_node, visited | {next_node}, cost + distance_matrix[node][next_node], path + [next_node])
tsp(0, {0}, 0, [0])
return best_route, min_distance
Разбор кода
Функция branch_and_bound_tsp(distance_matrix)
Переменные:
- n = len(distance_matrix) – количество городов.
- min_distance = float('inf') – минимально найденное расстояние.
- best_route = None – лучший найденный маршрут.
Рекурсивная функция tsp(node, visited, cost, path):
Базовый случай:
- Если len(path) == n, значит обошли все города.
- Добавляем расстояние до стартового города: cost += distance_matrix[node][0].
- Если новый маршрут лучше найденного, обновляем min_distance и best_route.
Рекурсивный случай:
- Перебираем все возможные города next_node, которые ещё не посещены.
- Вызываем tsp() для следующего города с обновлённым cost и path.
Запуск алгоритма:
tsp(0, {0}, 0, [0])
Стартуем с нуля, посещён только первый город.
Возвращает:
- best_route – лучший найденный маршрут.
- min_distance – длина этого маршрута.
Временная сложность:
- В худшем случае: O(n!) (как полный перебор).
- В среднем случае: значительно быстрее, так как отсекает ненужные ветви.
- Использует нижнюю границу (bound), что сокращает количество перебираемых маршрутов.
Пространственная сложность:
- O(n) – из-за хранения visited и path.
✅ Достоинства решения:
- Находит оптимальное решение (если не прерывать алгоритм).
- Лучше, чем полный перебор (O(n!)), так как отсекает плохие маршруты.
- Не требует большого объёма памяти, как динамическое программирование (O(n * 2^n)) или ACO.
❌ Недостатки решения:
- Всё ещё экспоненциальная сложность в худшем случае.
- Может работать долго при n > 20, если не удаётся отсечь много ветвей.
- Зависит от порядка посещения городов – можно ускорить, если предварительно отсортировать рёбра.
Алгоритм Литтла или исключения подциклов#
-
Операция редукции по строкам
В каждой строке матрицы находят минимальный элементd_minи вычитают его из всех элементов соответствующей строки.
Нижняя граница:
H = 3 * d_min -
Операция редукции по столбцам
В каждом столбце матрицы выбирают минимальный элементd_minи вычитают его из всех элементов соответствующего столбца.
Нижняя граница:
H = H + J * d_min -
Константа приведения
Константа приведенияHявляется нижней границей множества всех допустимых гамильтоновых контуров. -
Поиск степеней нулей
Для приведенной по строкам и столбцам матрицы временно заменяют нули на знак «>» и находят сумму минимальных элементов строки и столбца, соответствующих этому нулю. -
Выбор дуги с максимальной степенью нуля
Выбирают дугу(i, j), для которой степень нулевого элемента достигает максимального значения. -
Разбиение множества на подмножества
Разбивают множество всех гамильтоновых контуров на два подмножества: - Подмножество контуров, содержащих дугу
(i, j). - Подмножество контуров, не содержащих дугу
(i, j).
Для получения матрицы контуров, включающих дугу (i, j), вычеркивают в матрице строку i и столбец j. Чтобы не допустить образования негамильтонова контура, заменяют симметричный элемент (j, i) на знак «>». Исключение дуги достигается заменой элемента в матрице на «∞».
-
Приведение матрицы контуров
Проводят приведение матрицы гамильтоновых контуров с поиском констант приведенияH(i, j)иH(i*, j*). -
Сравнение нижних границ подмножеств
Сравнивают нижние границы подмножества гамильтоновых контуровH(i, j)иH(i*, j*). Если: H(i, j) < H(i*, j*), то дальнейшему ветвлению в первую очередь подлежит множество(i, j).-
В противном случае разбиению подлежит множество
(i*, j*). -
Завершение ветвлений
Если в результате ветвлений получается матрица размером2x2, то определяют полученный гамильтонов контур и его длину. -
Сравнение длины гамильтонова контура с нижними границами
Сравнивают длину гамильтонова контура с нижними границами оборванных ветвей. Если длина контура не превышает их нижних границ, то задача решена.
В противном случае развивают ветви подмножеств с нижней границей, меньшей полученного контура, до тех пор, пока не получится маршрут с меньшей длиной.
Пример решения задачи коммивояжера методом ветвей и границ#
Решение будем вести с использованием калькулятора. Возьмем в качестве произвольного маршрута:
- X0 = (1,2); (2,3); (3,4); (4,5); (5,1)
Тогда F(X0) = 90 + 40 + 60 + 50 + 20 = 260
Для определения нижней границы множества воспользуемся операцией редукции или приведения матрицы по строкам, для чего необходимо в каждой строке матрицы D найти минимальный элемент.
Матрица D:#
| i/j | 1 | 2 | 3 | 4 | 5 | di |
|---|---|---|---|---|---|---|
| 1 | M | 90 | 80 | 40 | 100 | 40 |
| 2 | 60 | M | 40 | 50 | 70 | 40 |
| 3 | 50 | 30 | M | 60 | 20 | 20 |
| 4 | 10 | 70 | 20 | M | 50 | 10 |
| 5 | 20 | 40 | 50 | 20 | M | 20 |
Затем вычитаем di из элементов рассматриваемой строки. В связи с этим во вновь полученной матрице в каждой строке будет как минимум один ноль.
Редуцированная матрица (по строкам):#
| i/j | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 1 | M | 50 | 40 | 0 | 60 |
| 2 | 20 | M | 0 | 10 | 30 |
| 3 | 30 | 10 | M | 40 | 0 |
| 4 | 0 | 60 | 10 | M | 40 |
| 5 | 0 | 20 | 30 | 0 | M |
Теперь проводим редукцию по столбцам. Для этого в каждом столбце находим минимальный элемент.
Редуцированная матрица (по столбцам):#
| i/j | 1 | 2 | 3 | 4 | 5 | dj |
|---|---|---|---|---|---|---|
| 1 | M | 50 | 40 | 0 | 60 | 40 |
| 2 | 20 | M | 0 | 10 | 30 | 10 |
| 3 | 30 | 10 | M | 40 | 0 | 20 |
| 4 | 0 | 60 | 10 | M | 40 | 10 |
| 5 | 0 | 20 | 30 | 0 | M | 20 |
После вычитания минимальных элементов получаем полностью редуцированную матрицу:
Полностью редуцированная матрица:#
| i/j | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| 1 | M | 40 | 40 | 0 | 60 |
| 2 | 20 | M | 0 | 10 | 30 |
| 3 | 30 | 0 | M | 40 | 0 |
| 4 | 0 | 50 | 10 | M | 40 |
| 5 | 0 | 10 | 30 | 0 | M |
Сумма констант приведения определяет нижнюю границу H:
- H = ∑di + ∑dj
- H = 40 + 40 + 20 + 10 + 20 + 0 + 10 + 0 + 0 + 0 = 140
Элементы матрицы dij соответствуют расстоянию от пункта i до пункта j.
Поскольку в матрице n городов, то D является матрицей nxn с неотрицательными элементами dij >= 0.
Каждый допустимый маршрут представляет собой цикл, по которому коммивояжер посещает город только один раз и возвращается в исходный город. Длина маршрута определяется выражением:
- F(Mk) = ∑dij
Причем каждая строка и столбец входят в маршрут только один раз с элементом dij.
Шаг 1
Определяем ребро ветвления и разбиваем все множество маршрутов относительно этого ребра на два подмножества (i,j) и (i*,j*).
С этой целью для всех клеток матрицы с нулевыми элементами заменяем поочередно нули на M (бесконечность) и определяем для них сумму образовавшихся констант приведения, они приведены в скобках.
Матрица с нулями, заменёнными на M:
| i/j | 1 | 2 | 3 | 4 | 5 | di |
|---|---|---|---|---|---|---|
| 1 | M | 40 | 40 | 0(40) | 60 | 40 |
| 2 | 20 | M | 0(20) | 10 | 30 | 10 |
| 3 | 30 | 0(10) | M | 40 | 0(30) | 0 |
| 4 | 0(10) | 50 | 10 | M | 40 | 10 |
| 5 | 0(0) | 10 | 30 | 0(0) | M | 0 |
Шаг 2
Наибольшая сумма констант приведения равна (40 + 0) = 40 для ребра (1,4), следовательно, множество разбивается на два подмножества (1,4) и (1*,4*).
Нижняя граница гамильтоновых циклов этого подмножества:
- H(1*,4*) = 140 + 40 = 180
Исключение ребра (1,4) проводим путем замены элемента d14 = 0 на M, после чего осуществляем очередное приведение матрицы расстояний для образовавшегося подмножества (1*,4*), в результате получим редуцированную матрицу.
Новая редуцированная матрица:
| i/j | 1 | 2 | 3 | 4 | 5 | di |
|---|---|---|---|---|---|---|
| 1 | M | 40 | 40 | M | 60 | 40 |
| 2 | 20 | M | 0 | 10 | 30 | 0 |
| 3 | 30 | 0 | M | 40 | 0 | 0 |
| 4 | 0 | 50 | 10 | M | 40 | 0 |
| 5 | 0 | 10 | 30 | 0 | M | 20 |
Итак, на каждом шаге происходит выбор оптимального ребра, исключение его из маршрута и пересчет нижней границы. Процесс продолжается до тех пор, пока не будут найдены все оптимальные ребра маршрута.
Результат:
Гамильтонов цикл образуют следующие ребра: (1,4), (4,3), (3,5), (5,2), (2,1). Длина маршрута равна:
- F(Mk) = 180
Список источников#
- Галяутдинов Р.Р. Задача коммивояжера — метод ветвей и границ // Сайт преподавателя экономики. [2023]. URL: https://galyautdinov.ru/post/zadacha-kommivoyazhera (дата обращения: 28.04.2025).